4.9 KiB
ROS–Unity Integration: UnityService
Create a simple Unity scene which create a Service in Unity that takes a request with a GameObject's name and responds with the GameObject's pose (position and orientation) in the ROS coordinate system.
Setting Up ROS
(Skip to Setting Up the Unity Scene if you already did the ROS–Unity Integration Publisher or Subscriber tutorials.)
-
Copy the
tutorials/ros_packages/robotics_demofolder of this repo into thesrcfolder in your Catkin workspace. -
Follow the ROS–Unity Initial Setup guide.
-
Open a new terminal window, navigate to your ROS workspace, and run the following commands:
source devel/setup.bash rosrun robotics_demo server_endpoint.py
Once the server_endpoint has started, it will print something similar to [INFO] [1603488341.950794]: Starting server on 192.168.50.149:10000.
Setting Up the Unity Scene
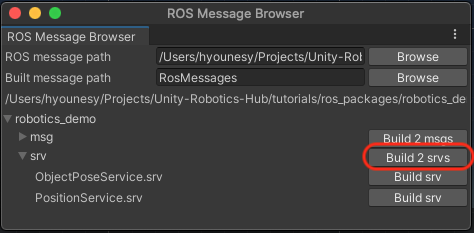
- Generate the C# code for
ObjectPoseService's messages by going toRobotics->Generate ROS Messages... - Set the input file path to
PATH/TO/Unity-Robotics-Hub/tutorials/ros_packages/robotics_demo, expand the robotics_demo folder and clickBuild 2 srvs(Note that you may skip this step if you have already done it in the previous tutorial).
-
The generated files will be saved in the default directory
Assets/RosMessages/RoboticsDemo/srv. -
Create a new C# script and name it
RosUnityServiceExample.cs -
Paste the following code into
RosUnityServiceExample.cs- Note: This script can be found at
tutorials/ros_unity_integration/unity_scripts.
- Note: This script can be found at
using RosMessageTypes.RoboticsDemo;
using UnityEngine;
using Unity.Robotics.ROSTCPConnector;
using Unity.Robotics.ROSTCPConnector.ROSGeometry;
/// <summary>
/// Example demonstration of implementing a UnityService that receives a Request message from another ROS node and sends a Response back
/// </summary>
public class RosUnityServiceExample : MonoBehaviour
{
[SerializeField]
string m_ServiceName = "obj_pose_srv";
void Start()
{
// register the service with ROS
ROSConnection.instance.ImplementService<MObjectPoseServiceRequest>(m_ServiceName, GetObjectPose);
}
/// <summary>
/// Callback to respond to the request
/// </summary>
/// <param name="request">service request containing the object name</param>
/// <returns>service response containing the object pose (or 0 if object not found)</returns>
private MObjectPoseServiceResponse GetObjectPose(MObjectPoseServiceRequest request)
{
// process the service request
Debug.Log("Received request for object: " + request.object_name);
// prepare a response
MObjectPoseServiceResponse objectPoseResponse = new MObjectPoseServiceResponse();
// Find a game object with the requested name
GameObject gameObject = GameObject.Find(request.object_name);
if (gameObject)
{
// Fill-in the response with the object pose converted from Unity coordinate to ROS coordinate system
objectPoseResponse.object_pose.position = gameObject.transform.position.To<FLU>();
objectPoseResponse.object_pose.orientation = gameObject.transform.rotation.To<FLU>();
}
return objectPoseResponse;
}
}
- From the main menu bar, open
Robotics/ROS Settings, and change theROS IP Addressvariable to the ROS IP. - Create an empty GameObject and name it
UnityService. - Attach the
RosUnityServiceExamplescript to theUnityServiceGameObject. - Pressing play in the Editor should start running as a ROS node, waiting to accept ObjectPose requests. Once a connection to ROS has been established, a message will be printed on the ROS terminal similar to
Connection from 172.17.0.1.
Start the Client
-
On your ROS system, open a new terminal window, navigate to your ROS workspace, and run the following commands:
source devel/setup.bash rosrun robotics_demo object_pose_client.py Cube -
This wil print an output similar to the following with the current pose information of the game object (note that the coordinates are converted to the ROS coordinate system in our Unity Service):
Requesting pose for Cube Pose for Cube: position: x: 0.0 y: -1.0 z: 0.20000000298023224 orientation: x: 0.0 y: -0.0 z: 0.0 w: -1.0
You may replace Cube with the name of any other GameObject currently present in the Unity hierarchy.
-
Alternatively you may also call the ROS service using
rosservice call:rosservice call /obj_pose_srv Cubeobject_pose: position: x: 0.0 y: -1.0 z: 0.20000000298023224 orientation: x: 0.0 y: -0.0 z: 0.0 w: -1.0