3.6 KiB
ROS–Unity Integration: Publisher
Create a simple Unity scene which publishes a GameObject's position and rotation to a ROS topic.
Setting Up ROS
-
Copy the
tutorials/ros_packages/robotics_demofolder of this repo into thesrcfolder in your Catkin workspace. -
Follow the ROS–Unity Initial Setup guide.
-
Open a new terminal window and run the following commands:
source devel/setup.bash rosrun robotics_demo server_endpoint.py
Once the server_endpoint has started, it will print something similar to [INFO] [1603488341.950794]: Starting server on 192.168.50.149:10000.
- Open another new terminal window, navigate to your ROS workspace, and run the following commands:
source devel/setup.bash rostopic echo pos_rot
Setting Up Unity Scene
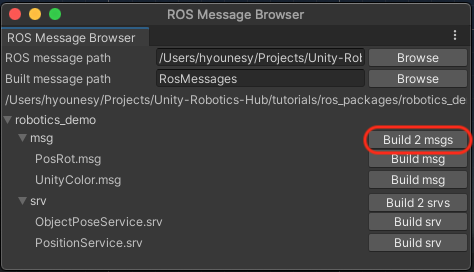
- In the menu bar, find and select
Robotics->Generate ROS Messages... - Set the ROS message path to
PATH/TO/Unity-Robotics-Hub/tutorials/ros_packages/robotics_demo.- Expand the robotics_demo subfolder and click "Build 2 msgs" to generate new C# scripts from the ROS .msg files.
- The generated files will be saved in the default directory
Assets/RosMessages/RoboticsDemo/msg. - Create a new directory in
Assetsand name itScripts - Create a new script in the
Scriptsdirectory and name itRosPublisherExample.cs - Open
RosPublisherExample.csand paste the following code:- Note Script can be found at
tutorials/ros_unity_integration/unity_scripts
- Note Script can be found at
using RosMessageTypes.RoboticsDemo;
using UnityEngine;
using Unity.Robotics.ROSTCPConnector;
/// <summary>
///
/// </summary>
public class RosPublisherExample : MonoBehaviour
{
ROSConnection ros;
public string topicName = "pos_rot";
// The game object
public GameObject cube;
// Publish the cube's position and rotation every N seconds
public float publishMessageFrequency = 0.5f;
// Used to determine how much time has elapsed since the last message was published
private float timeElapsed;
void Start()
{
// start the ROS connection
ros = ROSConnection.instance;
}
private void Update()
{
timeElapsed += Time.deltaTime;
if (timeElapsed > publishMessageFrequency)
{
cube.transform.rotation = Random.rotation;
MPosRot cubePos = new MPosRot(
cube.transform.position.x,
cube.transform.position.y,
cube.transform.position.z,
cube.transform.rotation.x,
cube.transform.rotation.y,
cube.transform.rotation.z,
cube.transform.rotation.w
);
// Finally send the message to server_endpoint.py running in ROS
ros.Send(topicName, cubePos);
timeElapsed = 0;
}
}
}
-
Add a plane and a cube to the empty Unity scene
-
Move the cube a little ways up so it is hovering above the plane
-
In the main menu bar, open
Robotics/ROS Settings.- Set the ROS IP address and port to match the ROS IP and port variables defined when you set up ROS.
-
Create another empty GameObject, name it
RosPublisherand attach theRosPublisherExamplescript.- Drag the cube GameObject onto the
Cubeparameter.
- Drag the cube GameObject onto the
-
Pressing play in the Editor should publish a message to the terminal running the
rostopic echo pos_rotcommand every 0.5 seconds

Continue to the ROS Subscriber tutorial.