4.5 KiB
Brains
The Brain encapsulates the decision making process. Every Agent must be assigned a Brain, but you can use the same Brain with more than one Agent. You can also create several Brains, attach each of the Brain to one or more than one Agent.
There are 3 kinds of Brains you can use:
- Learning – Use a LearningBrain to make use of a trained model or train a new model.
- Heuristic – Use a HeuristicBrain to hand-code the Agent's logic by extending the Decision class.
- Player – Use a PlayerBrain to map keyboard keys to Agent actions, which can be useful to test your Agent code.
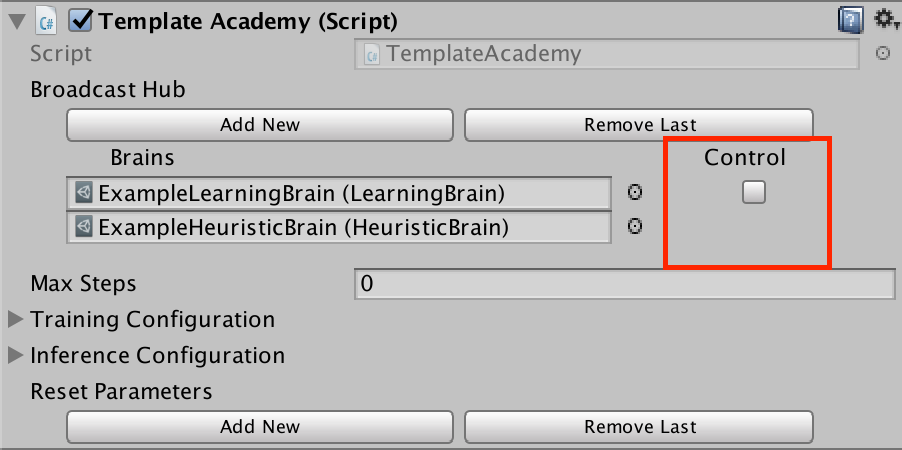
During training, use a Learning Brain
and drag it into the Academy's Broadcast Hub with the Control checkbox checked.
When you want to use the trained model, import the model file into the Unity
project, add it to the Model property of the Learning Brain and uncheck
the Control checkbox of the Broadcast Hub.
Brain assets has several important properties that you can set using the
Inspector window. These properties must be appropriate for the Agents using the
Brain. For example, the Vector Observation Space Size property must match the
length of the feature vector created by an Agent exactly. See
Agents for information about creating
agents and setting up a Brain instance correctly.
Brain Properties
The Brain Inspector window in the Unity Editor displays the properties assigned to a Brain component:

Brain Parameters- Define vector observations, visual observation, and vector actions for the Brain.Vector ObservationSpace Size- Length of vector observation for Brain.Stacked Vectors- The number of previous vector observations that will be stacked and used collectively for decision making. This results in the effective size of the vector observation being passed to the Brain being: Space Size x Stacked Vectors.
Visual Observations- Describes height, width, and whether to grayscale visual observations for the Brain.Vector ActionSpace Type- Corresponds to whether action vector contains a single integer (Discrete) or a series of real-valued floats (Continuous).Space Size(Continuous) - Length of action vector for Brain.Branches(Discrete) - An array of integers, defines multiple concurrent discrete actions. The values in theBranchesarray correspond to the number of possible discrete values for each action branch.Action Descriptions- A list of strings used to name the available actions for the Brain.
The other properties of the Brain depend on the type of Brain you are using.
Using the Broadcast Feature
The Player, Heuristic and Learning Brains can support broadcast to an external process. The broadcast feature allows you to collect data from your Agents using a Python program without controlling them.
How to use: Unity
To turn it on in Unity, drag the Brain into the Academy's Broadcast Hub but leave
the Control checkbox unchecked when present. This will expose the Brain's data
without letting the external process control it.
How to use: Python
When you launch your Unity Environment from a Python program, you can see what
the Agents connected to Brains present in the Broadcast Hub are doing.
When calling step or
reset on your environment, you retrieve a dictionary mapping Brain names to
BrainInfo objects. The dictionary contains a BrainInfo object for each
Brain in the Broadcast Hub.
Just like with a Learning Brain, the BrainInfo object contains the fields for
visual_observations, vector_observations, text_observations,
memories,rewards, local_done, max_reached, agents and
previous_actions. Note that previous_actions corresponds to the actions that
were taken by the Agents at the previous step, not the current one.
Note that when you do a step on the environment, you can only provide actions
for the Brains in the Broadcast Hub with the Control checkbox checked. If there
are Brains in the Broadcast Hub with the
Control checkbox checked, simply call step() with no arguments.
You can use the broadcast feature to collect data generated by Player, Heuristics or Learning Brains game sessions. You can then use this data to train an agent in a supervised context.