5.1 KiB
Training with Curriculum Learning
Sample Environment
Imagine a task in which an agent needs to scale a wall to arrive at a goal. The starting point when training an agent to accomplish this task will be a random policy. That starting policy will have the agent running in circles, and will likely never, or very rarely scale the wall properly to the achieve the reward. If we start with a simpler task, such as moving toward an unobstructed goal, then the agent can easily learn to accomplish the task. From there, we can slowly add to the difficulty of the task by increasing the size of the wall, until the agent can complete the initially near-impossible task of scaling the wall. We are including just such an environment with the ML-Agents toolkit 0.2, called Wall Jump.
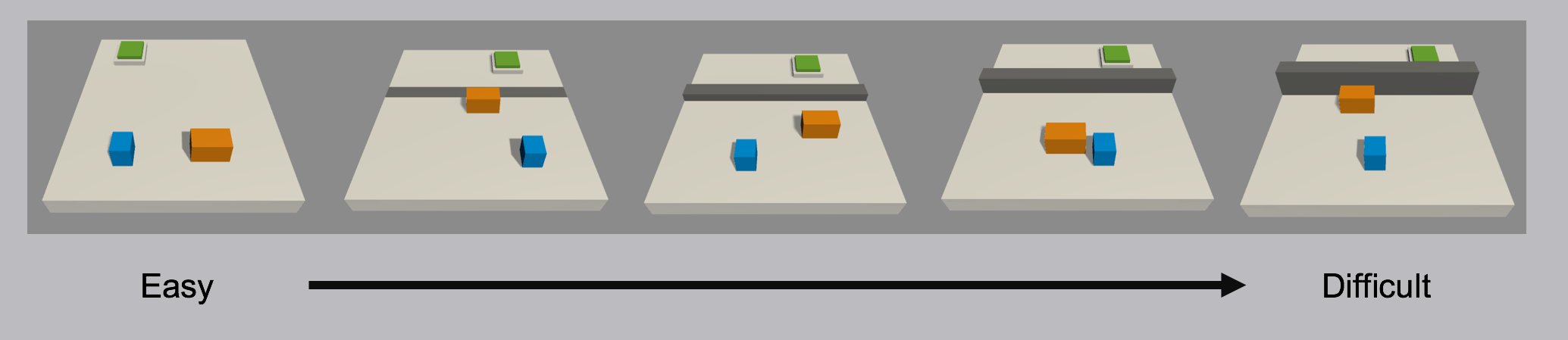
Demonstration of a curriculum training scenario in which a progressively taller wall obstructs the path to the goal.
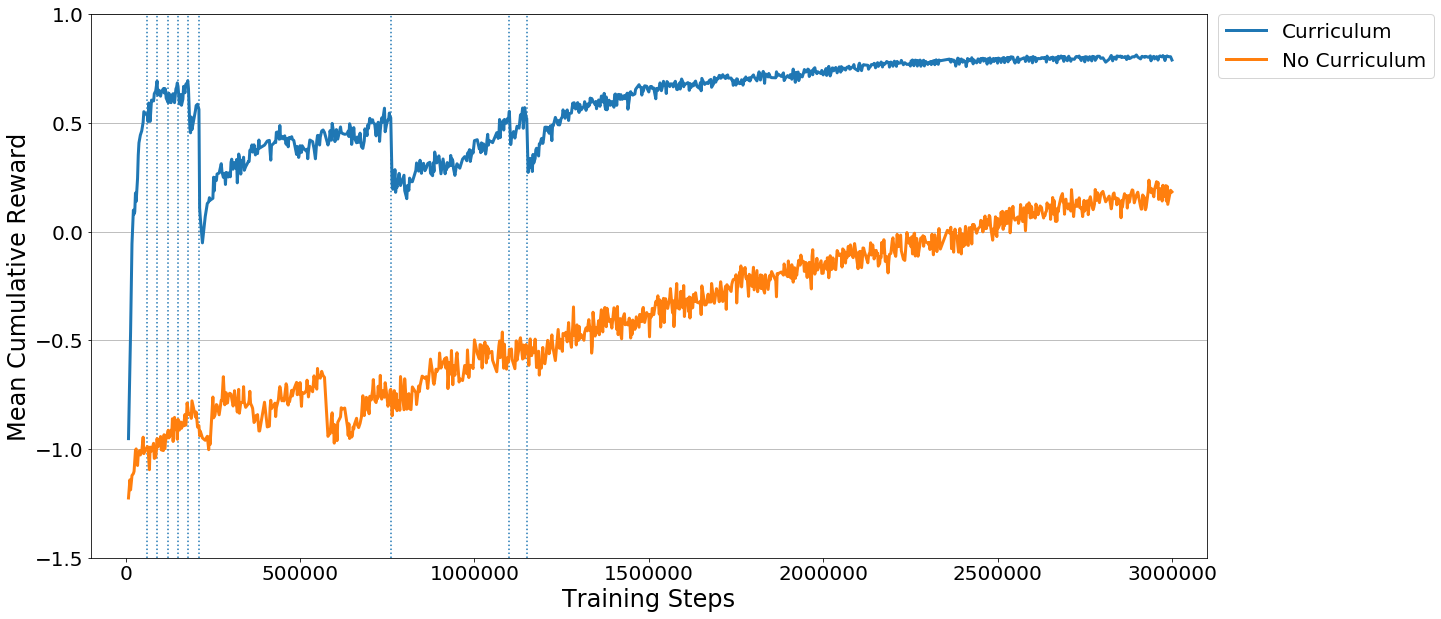
To see this in action, observe the two learning curves below. Each displays the reward over time for an agent trained using PPO with the same set of training hyperparameters. The difference is that one agent was trained using the full-height wall version of the task, and the other agent was trained using the curriculum version of the task. As you can see, without using curriculum learning the agent has a lot of difficulty. We think that by using well-crafted curricula, agents trained using reinforcement learning will be able to accomplish tasks otherwise much more difficult.
How-To
Each Brain in an environment can have a corresponding curriculum. These curriculums are held in what we call a metacurriculum. A metacurriculum allows different brains to follow different curriculums within the same environment.
Specifying a Metacurriculum
We first create a folder inside python/curricula/ for the environment we want
to use curriculum learning with. For example, if we were creating a
metacurriculum for Wall Jump, we would create the folder
python/curricula/wall-jump/. We will place our curriculums inside this folder.
Specifying a Curriculum
In order to define a curriculum, the first step is to decide which parameters of
the environment will vary. In the case of the Wall Jump environment, what varies
is the height of the wall. We define this as a Reset Parameter in the Academy
object of our scene, and by doing so it becomes adjustable via the Python API.
Rather than adjusting it by hand, we will create a JSON file which
describes the structure of the curriculum. Within it, we can specify which
points in the training process our wall height will change, either based on the
percentage of training steps which have taken place, or what the average reward
the agent has received in the recent past is. Below is an example curriculum for
the BigWallBrain in the Wall Jump environment.
{
"measure" : "progress",
"thresholds" : [0.1, 0.3, 0.5],
"min_lesson_length" : 2,
"signal_smoothing" : true,
"parameters" :
{
"big_wall_min_height" : [0.0, 4.0, 6.0, 8.0],
"big_wall_max_height" : [4.0, 7.0, 8.0, 8.0]
}
}
measure- What to measure learning progress, and advancement in lessons by.reward- Uses a measure received reward.progress- Uses ratio of steps/max_steps.
thresholds(float array) - Points in value ofmeasurewhere lesson should be increased.min_lesson_length(int) - How many times the progress measure should be reported before incrementing the lesson.signal_smoothing(true/false) - Whether to weight the current progress measure by previous values.- If
true, weighting will be 0.75 (new) 0.25 (old).
- If
parameters(dictionary of key:string, value:float array) - Corresponds to academy reset parameters to control. Length of each array should be one greater than number of thresholds.
Once our curriculum is defined, we have to use the reset parameters we defined
and modify the environment from the agent's AgentReset() function. See
WallJumpAgent.cs
for an example. Note that if the Academy's Max Steps is not set to some
positive number the environment will never be reset. The Academy must reset
for the environment to reset.
We will save this file into our metacurriculum folder with the name of its
corresponding Brain. For example, in the Wall Jump environment, there are two
brains---BigWallBrain and SmallWallBrain. If we want to define a curriculum for
the BigWallBrain, we will save BigWallBrain.json into
python/curricula/wall-jump/.
Training with a Curriculum
Once we have specified our metacurriculum and curriculums, we can launch
learn.py using the –curriculum flag to point to the metacurriculum folder
and PPO will train using Curriculum Learning. For example, to train agents in
the Wall Jump environment with curriculum learning, we can run python learn.py --curriculum=curricula/wall-jump/ --run-id=wall-jump-curriculum --train. We can
then keep track of the current lessons and progresses via TensorBoard.