您最多选择25个主题
主题必须以中文或者字母或数字开头,可以包含连字符 (-),并且长度不得超过35个字符
11 KiB
11 KiB
学习环境示例
Unity ML-Agents 工具包中内置了一些搭建好的学习环境的示例,并且我们还在不断增加新的示例,这些示例演示了该平台的各种功能。示例环境位于
unity-environment/Assets/ML-Agents/Examples 中,并且我们在下文中进行了简单的介绍。
此外,我们的
首届 ML-Agents 挑战赛
中包含了由社区成员创建的一些环境示例。
此页仅概述了我们提供的示例环境。如果想要更多地学习如何设计和构建您自己的环境,请参阅 创建新的学习环境 页面。
如果您想提交自己的环境,请参阅我们的 贡献指南页面。
Basic

- 训练环境:一种线性移动任务,在此任务中 agent 必须向左或向右移动到奖励状态。
- 目标:移动到最高奖励状态。
- Agent设置:环境包含一个 agent,上面附带了单个 brain。
- Agent 奖励函数设置:
- 达到次优状态时 +0.1。
- 达到最优状态时 +1.0。
- Brain 设置:一个有以下观测/运动空间的 brain。
- 向量观测空间:(离散变量)一个变量,对应于当前状态。
- 向量运动空间:(离散变量)两个可能的动作(向左移动、向右移动)。
- 视觉观测:0
- 重置参数:无
3DBall: 3D Balance Ball

- 训练环境:一种平衡球任务,在此任务中 agent 需要控制平台。
- 目标:agent 必须平衡平台,以尽可能长时间在平台上保持球不掉落。
- Agent设置:环境包含 12 个全部链接到单个 brain 的同类 agent。
- Agent 奖励函数设置:
- 球在平台上保持不掉下的每一步都 +0.1。
- 球掉下平台时 -1.0。
- Brain 设置:一个有以下观测/运动空间的 brain。
- 向量观测空间:(连续变量)8 个,对应于平台的旋转以及球的位置、旋转和速度。
- 向量观测空间(困难版本,因为观测到的信息减少了):(连续变量)5 个变量,对应于平台的旋转以及球的位置和旋转。
- 向量运动空间:(连续变量)2 个,其中一个值对应于 X 旋转,而另一个值对应于 Z 旋转。
- 视觉观测:0
- 重置参数:无
GridWorld
- 训练环境:某一个典型版本的的grid-world任务。场景包含 agent、目标和障碍。
- 目标:agent 必须在网格中避开障碍的同时移动到目标。
- Agent设置:环境包含一个链接到单个 brain 的 agent。
- Agent 奖励函数设置:
- 每一步 -0.01。
- agent 导航到目标网格位置时 +1.0(场景结束)。
- agent 移动到障碍物时 -1.0(场景结束)。
- Brain 设置:一个有以下观测/运动空间的 brain。
- 向量观测空间:无
- 向量运动空间:(离散变量)4 个,对应于基本方向的移动。
- 视觉观测:一个对应于 GridWorld 自上而下的视图。
- 重置参数:三个参数,分别对应于网格大小、障碍物数量和目标数量。
Tennis
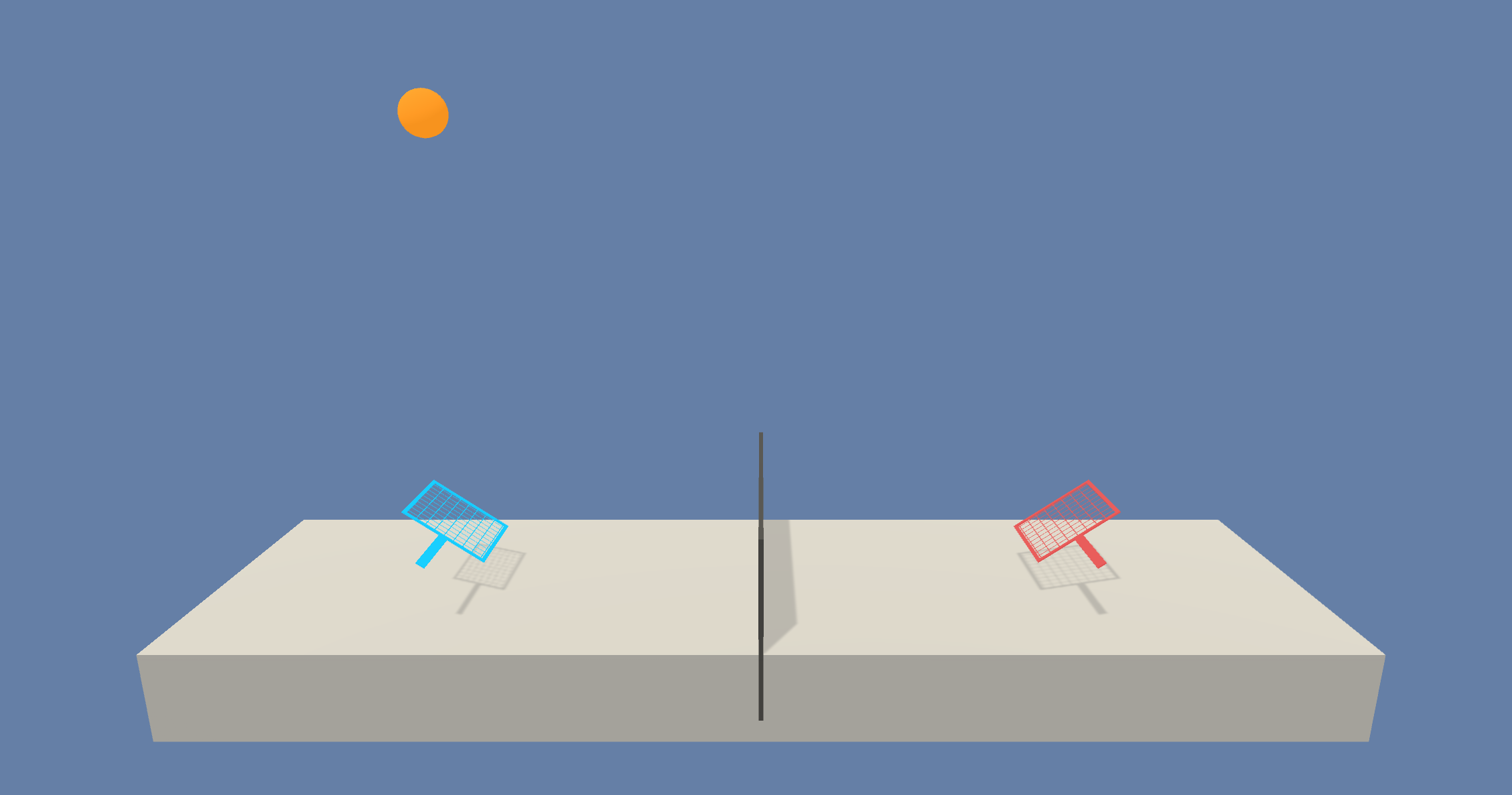
- 训练环境:agent 控制球拍将球弹过球网的双人游戏。
- 目标:agent 必须在彼此之间弹起网球,同时不能丢球或击球出界。
- Agent设置:环境包含两个链接到单个 brain(名为 TennisBrain)的 agent。在训练之后,您可以将另一个名为 MyBrain 的 brain 附加到其中一个 agent,从而与经过训练的模型进行游戏比赛。
- Agent 奖励函数设置(agent互相之间独立):
- agent 击球过网时 +0.1。
- agent 让球落入自己的范围或者击球出界时 -0.1。
- Brain 设置:一个有以下观测/运动空间的 brain。
- 向量观测空间:(连续变量)8 个,分别对应于球和球拍的位置和速度。
- 向量运动空间:(连续变量)2 个,分别对应于朝向球网或远离球网的运动,以及上下的运动。
- 视觉观测:无
- 重置参数:一个参数,对应于球的大小。
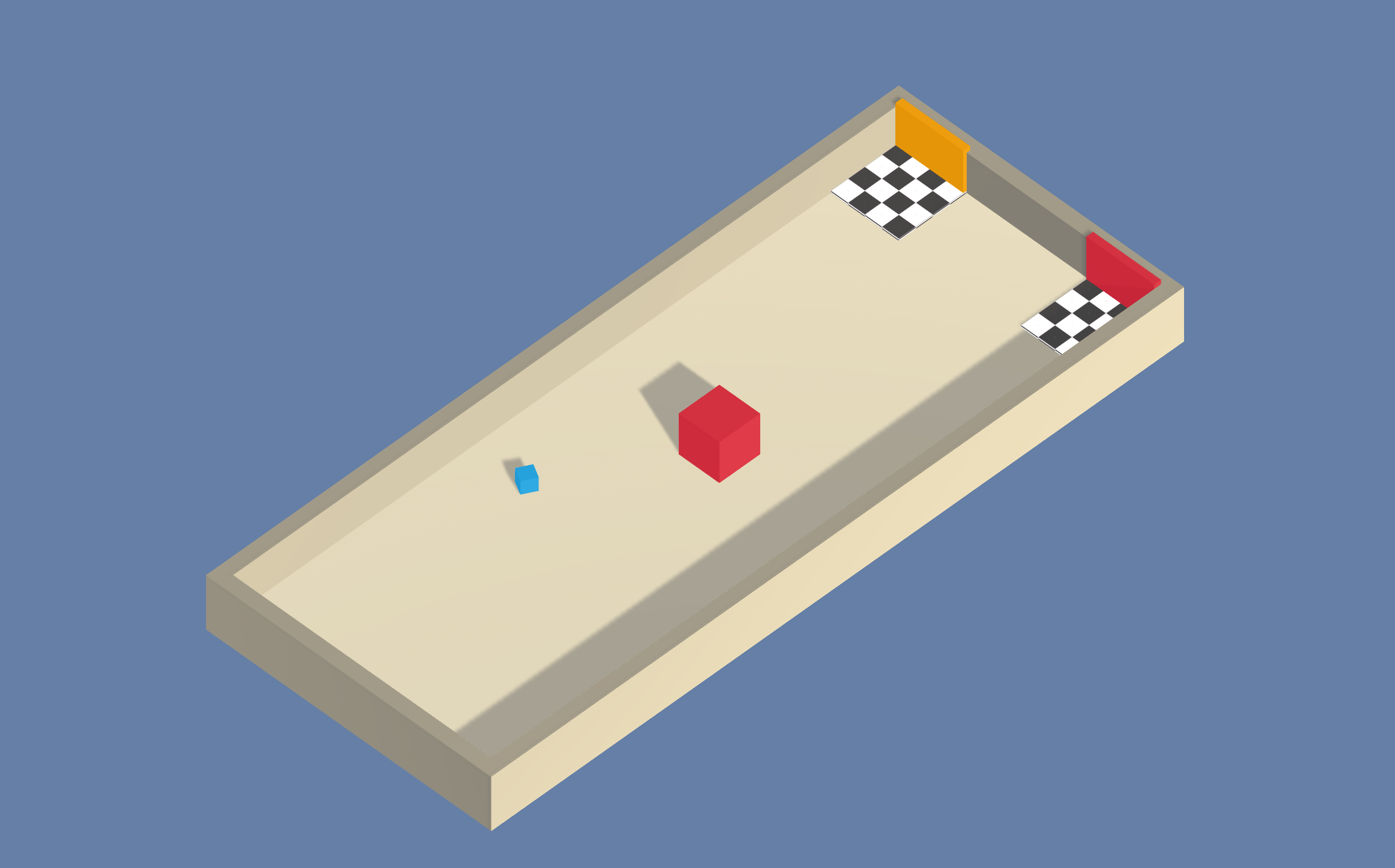
Push Block
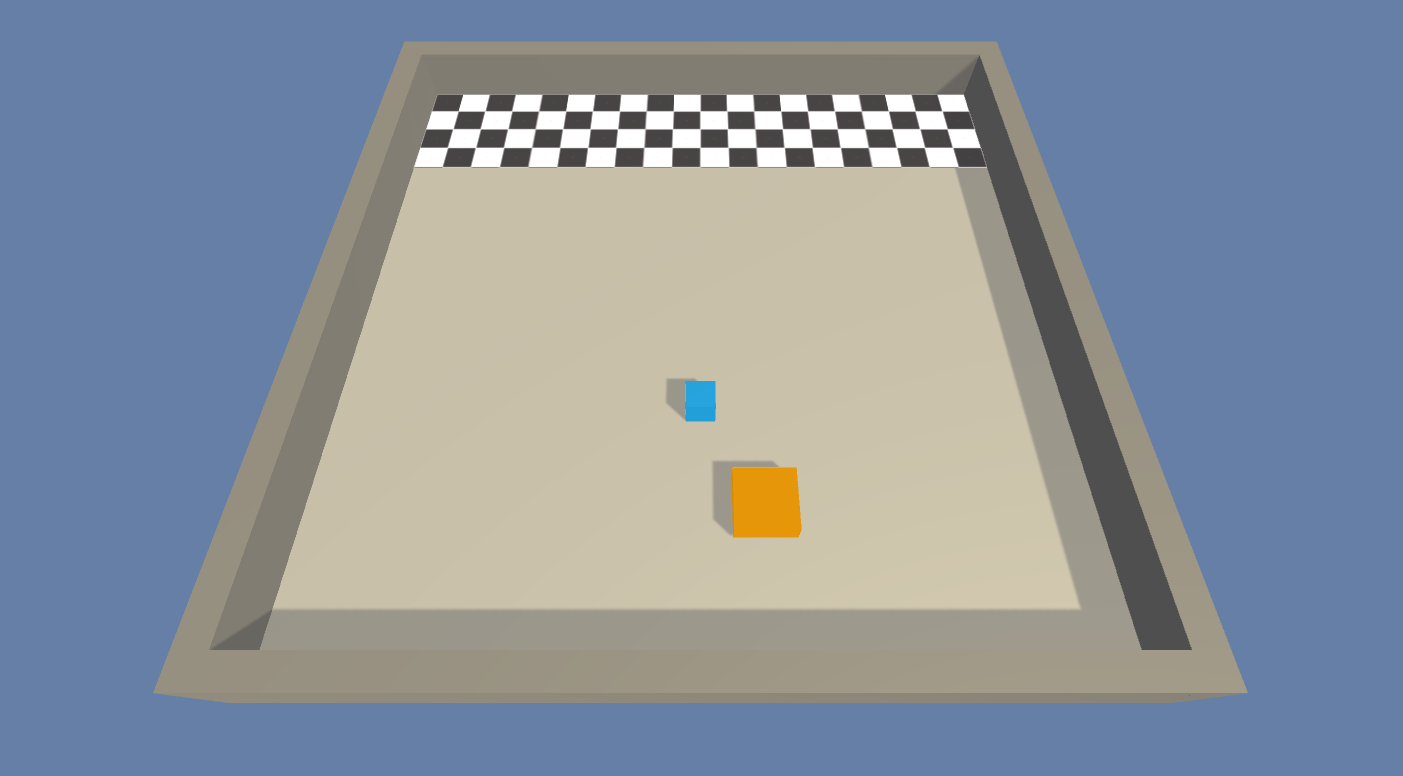
- 训练环境:一个平台,agent 可以在该平台上推动方块。
- 目标:agent 必须将方块推向目标。
- Agent设置:环境包含一个链接到单个 brain 的 agent。
- Agent 奖励函数设置:
- 每一步 -0.0025。
- 方块接触到目标时 +1.0。
- Brain 设置:一个有以下观测/运动空间的 brain。
- 向量观测空间:(连续变量)15 个,分别对应于 agent、方块和目标的位置和速度。
- 向量运动空间:(连续变量)2 个,分别对应于 X 和 Z 方向的移动。
- 视觉观测:无。
- 重置参数:无。
Wall Jump
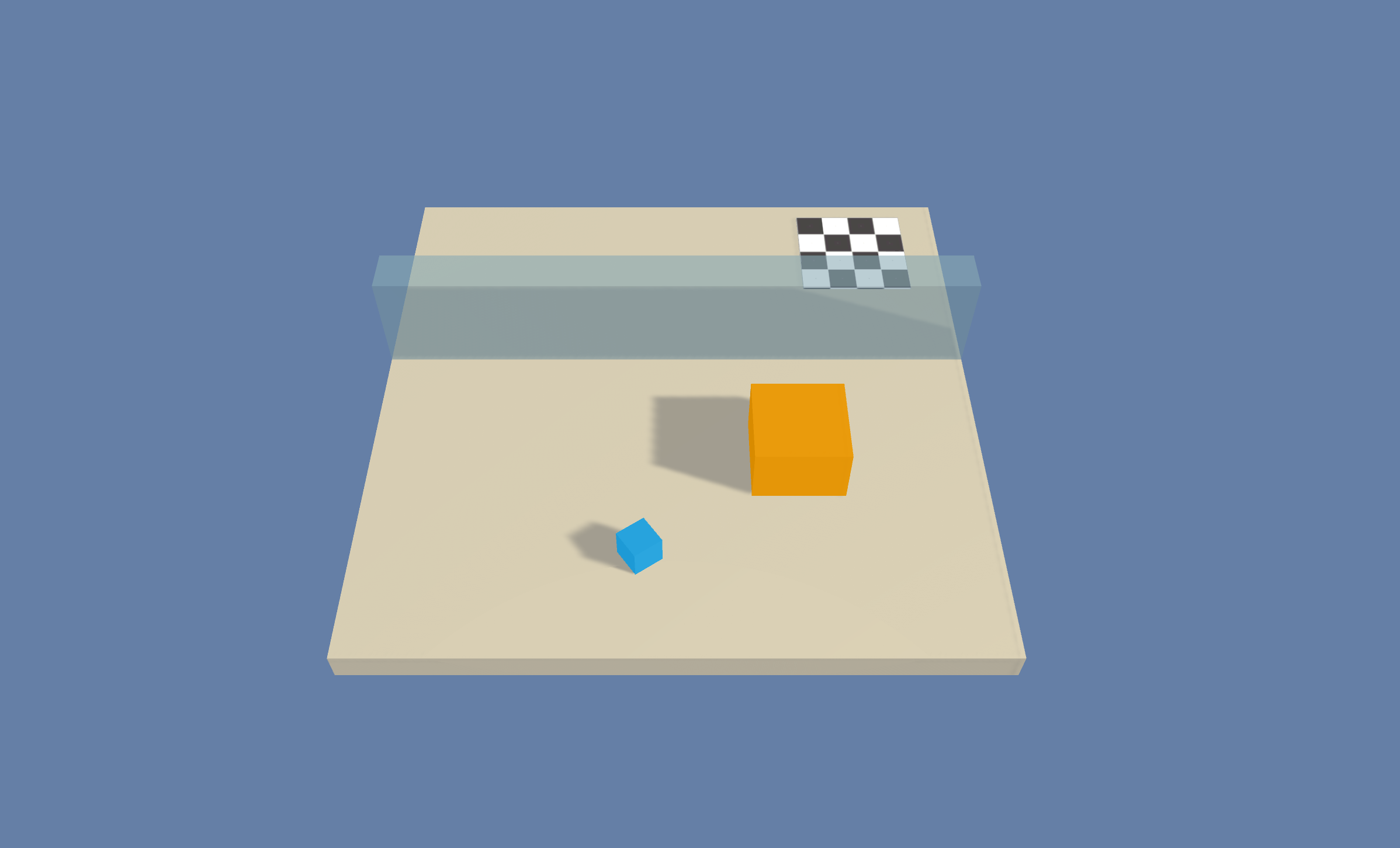
- 训练环境:一个平台环境,agent 可以在该环境中跳过墙。
- 目标:agent 必须利用一个方块越过墙并到达目标。
- Agent设置:环境包含一个链接到两个不同 brain 的 agent。agent 链接到的 brain 根据墙的高度而变化。
- Agent 奖励函数设置:
- 每一步 -0.0005。
- agent 接触到目标时 +1.0。
- agent 掉下平台时 -1.0。
- Brain 设置:一个有以下观测/运动空间的 brain。
- 向量观测空间:(连续变量)16 个,分别对应于 agent、方块和目标的位置和速度以及墙的高度。
- 向量运动空间:(离散变量)74 个,分别对应于 14 个射线投射,每个射线投射可检测 4 个可能的物体,加上 agent 的全局位置以及 agent 是否落地。
- 视觉观测:无。
- 重置参数:4,对应于可能的墙壁的高度。
Reacher
- 训练环境:可以移动到目标位置的双关节臂。
- 目标:agent 必须将手移动到目标位置,并保持在此处。
- Agent设置:环境包含 32 个链接到单个 brain 的 agent。
- Agent 奖励函数设置(agent互相之间独立):
- 当 agent 的手处于目标位置时,每过一步 +0.1。
- Brain 设置:一个有以下观测/运动空间的 brain。
- 向量观测空间:(连续变量)26 个,对应于两个机械臂 Rigidbody 的位置、旋转、速度和角速度。
- 向量运动空间:(连续变量)4 个,对应于两个关节的两个方向上的转动。
- 视觉观测:无
- 重置参数:两个,对应于目标大小和目标移动速度。
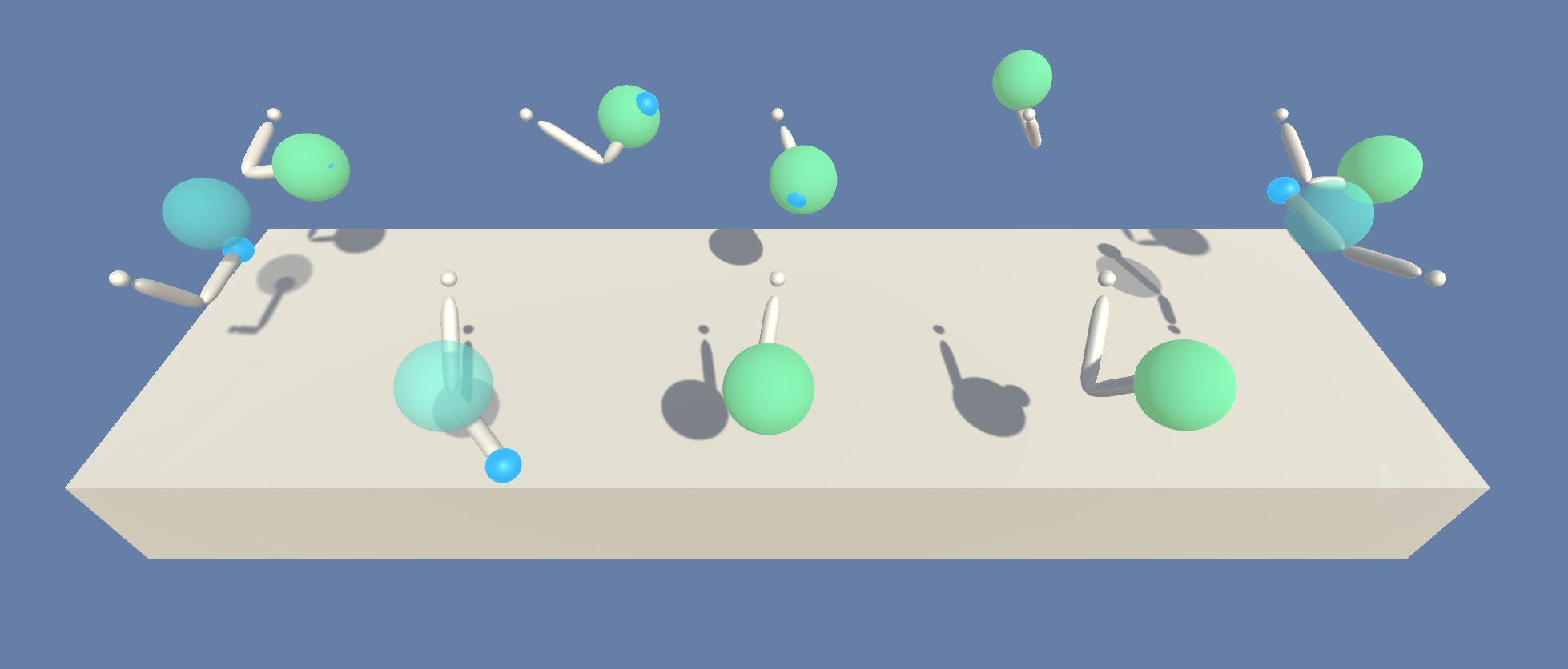
Crawler
- 训练环境:一种有 4 个手臂的生物,每个手臂分两节
- 目标:agent 必须沿 x 轴移动其身体,并且保持不跌倒。
- Agent设置:环境包含 3 个链接到单个 brain 的 agent。
- Agent 奖励函数设置(agent互相之间独立):
- +1 乘以 x 方向的速度
- 跌倒时 -1。
- -0.01 乘以动作平方
- -0.05 乘以 y 位置变化
- -0.05 乘以 z 方向的速度
- Brain 设置:一个有以下观测/运动空间的 brain。
- 向量观测空间:(连续变量)117 个,对应于每个肢体的位置、旋转、速度和角速度以及身体的加速度和角速度。
- 向量运动空间:(连续变量)12 个,对应于适用于 12 个关节的扭矩。
- 视觉观测:无
- 重置参数:无
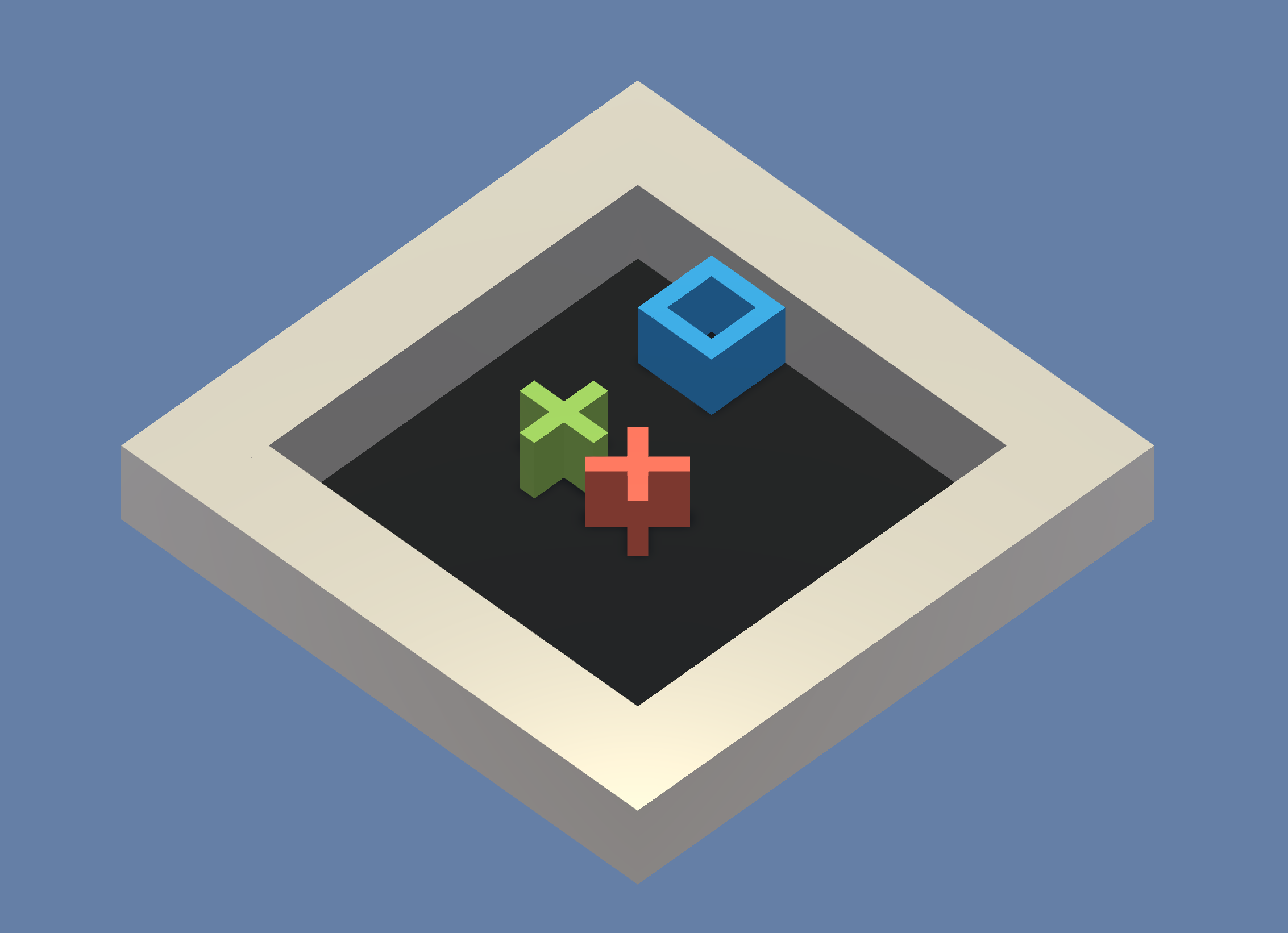
Banana Collector
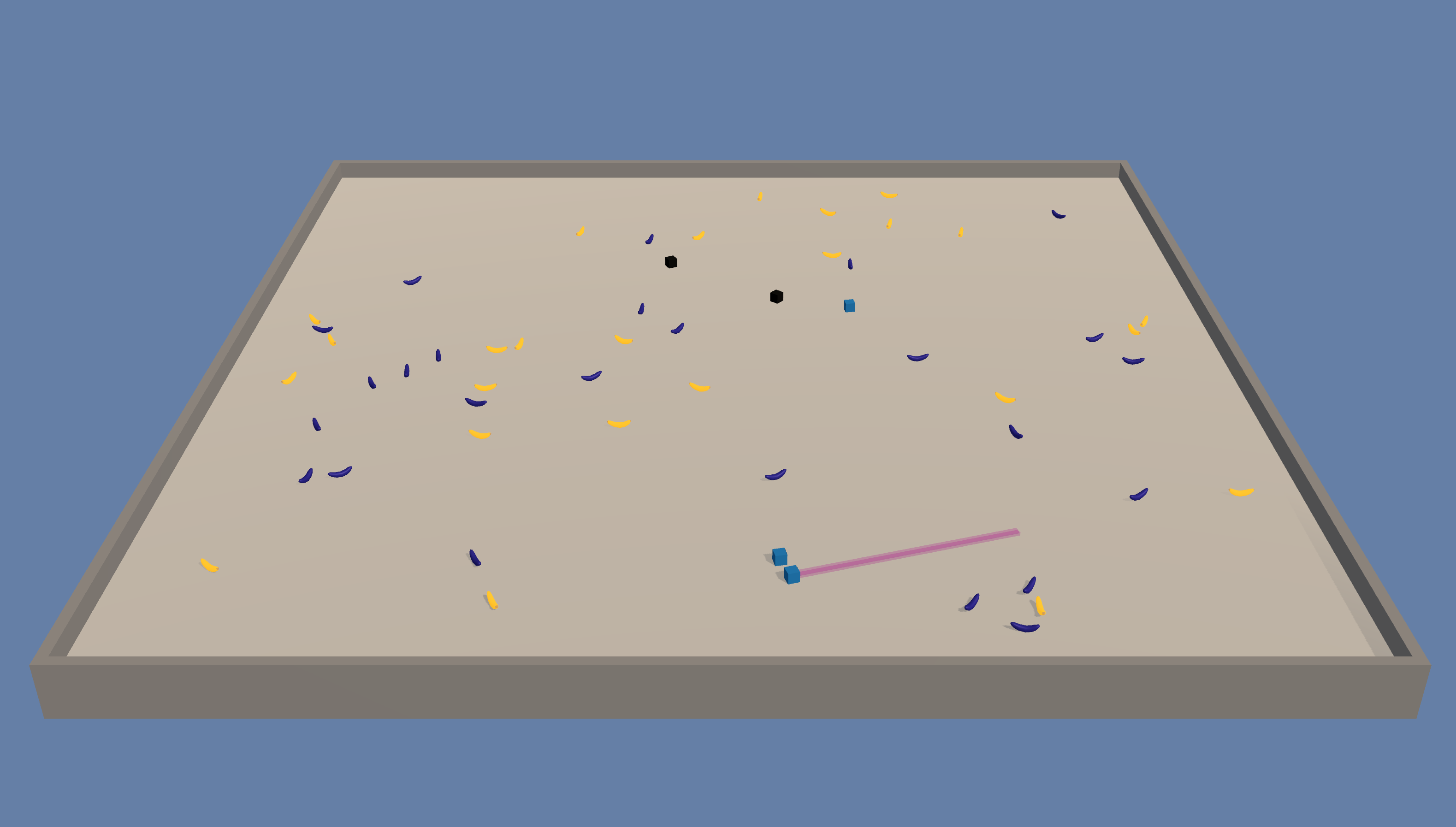
- 训练环境:一个包含多个 agent 的环境,这些 agent 争相收集香蕉。
- 目标:agent 必须学习尽可能接近更多的黄色香蕉,同时避开红色香蕉。
- Agent设置:环境包含 10 个链接到单个 brain 的 agent。
- Agent 奖励函数设置(agent互相之间独立):
- 接触黄色香蕉时 +1
- 接触红色香蕉时 -1。
- Brain 设置:一个有以下观测/运动空间的 brain。
- 向量观测空间:(连续变量)51 个,对应于 agent 的速度, agent 前进方向,以及 agent 对周围物体进行基于射线的感知。
- 向量运动空间:(连续变量)3 个,对应于向前移动,绕 y 轴旋转,以及是否使用激光使其他 agent 瘫痪。
- 视觉观测(可选):每个 agent 的第一人称视图。
- 重置参数:无
Hallway
- 训练环境:在一个环境中,agent 需要在房间内查找信息、记住信息并使用信息移动到正确目标。
- 目标:移动到与房间内的方块的颜色相对应的目标。
- Agent设置:环境包含一个链接到单个 brain 的 agent。
- Agent 奖励函数设置(agent互相之间独立):
- 移动到正确目标时 +1。
- 移动到错误目标时 -0.1。
- 时间流逝惩罚 -0.0003。
- Brain 设置:一个有以下观测/运动空间的 Brain:
- 向量观测空间:(连续变量)30 个,对应于针对物体、目标和墙壁的射线投射检测信号。
- 向量运动空间:(离散变量)4 个,对应于 agent 旋转和前进/后退运动。
- 视觉观测(可选):agent 的第一人称视图。
- 重置参数:无
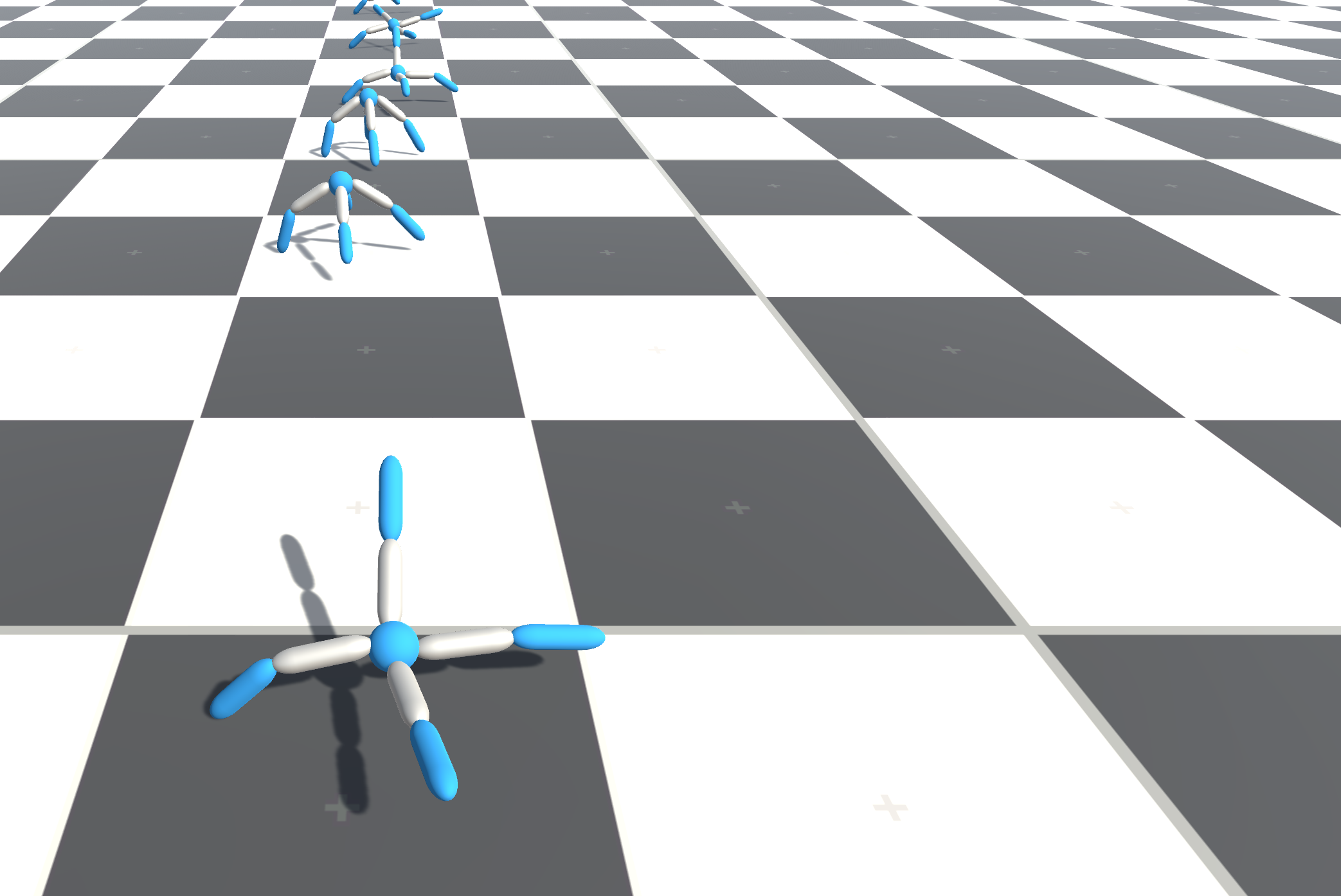
Bouncer
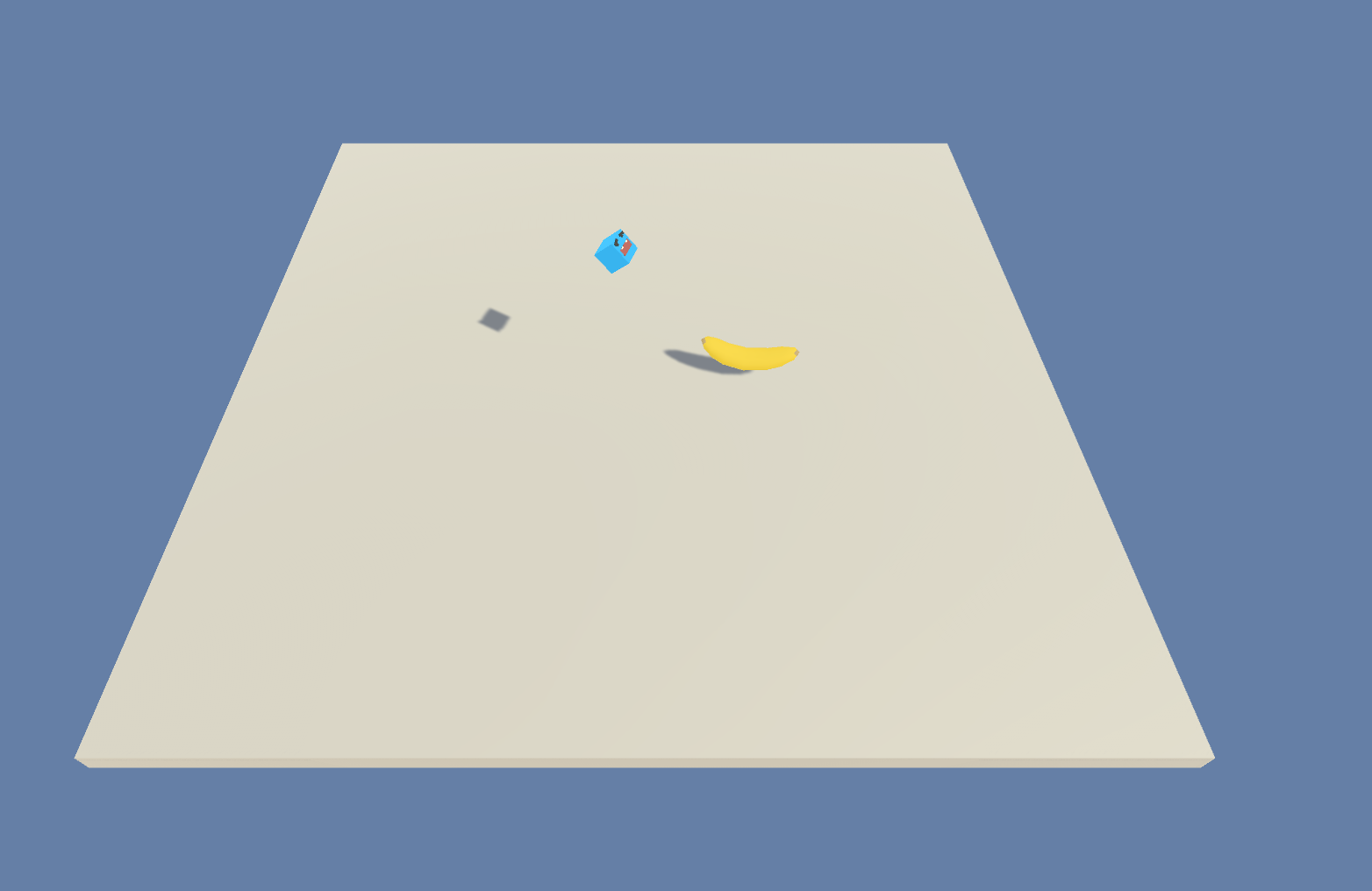
- 训练环境:在一个环境中,agent 需要按需决策。agent 必须决定在接触地面时如何进行下一次弹跳。
- 目标:抓住漂浮的香蕉。跳跃次数有限。
- Agent设置:环境包含一个链接到单个 brain 的 agent。
- Agent 奖励函数设置(agent互相之间独立):
- 抓住香蕉时 +1。
- 弹跳出界时 -1。
- -0.05 乘以跳跃力的在各个方向上的平方和。能量消耗惩罚。
- Brain 设置:一个有以下观测/运动空间的 Brain 的设置:
- 向量观测空间:(连续变量)6 个,对应于 agent 和香蕉的局部位置。
- 向量运动空间:(连续变量)3 个,对应于 agent 为跳跃所用的力。
- 视觉观测:无
- 重置参数:无
Soccer Twos
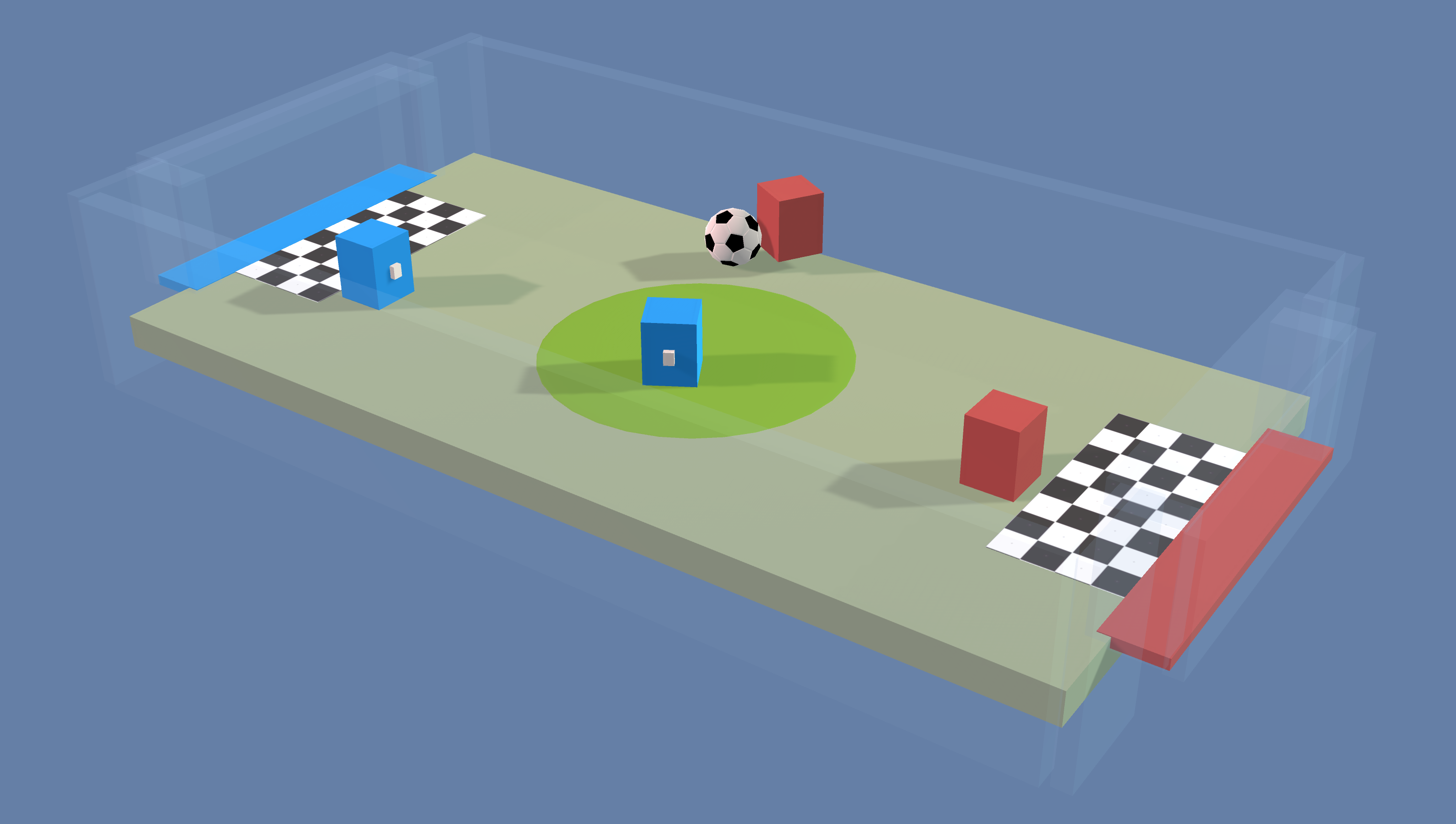
- 训练环境:在一个环境中,四个 agent 在 2 对 2 玩具足球比赛中比赛。
- 目标:
- 前锋:让球进入对手的球门。
- 守门员:防止球进入自己的球门。
- Agent设置:环境包含四个 agent,其中两个链接到一个 brain(前锋),两个链接到另一个 brain(守门员)。
- Agent 奖励函数设置(agent互相之间非独立):
- 前锋:
- 球进入对手球门时 +1。
- 球进入自己队的球门时 -0.1。
- 存在性惩罚 -0.001。
- 守门员:
- 球进入自己队的球门时 -1。
- 球进入对手球门时 +0.1。
- 存在性奖励 +0.001。
- 前锋:
- Brain 设置:两个有以下观测/运动空间的 Brain:
- 向量观测空间:(连续变量)112,对应于局部的 14 个射线投射,每个射线投射可检测 7 个可能的物体类型,以及物体的距离。感知范围是 agent 前面的 180 度视角。
- 向量运动空间:(离散变量)
- 前锋:6 个,对应于前进、后退、侧身移动以及旋转。
- 守门员:4 个,对应于前进、后退、侧身移动。
- 视觉观测:无
- 重置参数:无