|
|
5 年前 | |
|---|---|---|
| .. | ||
| gym_unity | 5 年前 | |
| images | 6 年前 | |
| README.md | 5 年前 | |
| setup.py | 5 年前 | |
README.md
Unity ML-Agents Gym Wrapper
A common way in which machine learning researchers interact with simulation
environments is via a wrapper provided by OpenAI called gym. For more
information on the gym interface, see here.
We provide a gym wrapper and instructions for using it with existing machine
learning algorithms which utilize gyms. Both wrappers provide interfaces on top
of our UnityEnvironment class, which is the default way of interfacing with a
Unity environment via Python.
Installation
The gym wrapper can be installed using:
pip install gym_unity
or by running the following from the /gym-unity directory of the repository:
pip install .
Using the Gym Wrapper
The gym interface is available from gym_unity.envs. To launch an environment
from the root of the project repository use:
from gym_unity.envs import UnityEnv
env = UnityEnv(environment_filename, worker_id, use_visual, uint8_visual, multiagent)
-
environment_filenamerefers to the path to the Unity environment. -
worker_idrefers to the port to use for communication with the environment. Defaults to0. -
use_visualrefers to whether to use visual observations (True) or vector observations (False) as the default observation provided by theresetandstepfunctions. Defaults toFalse. -
uint8_visualrefers to whether to output visual observations asuint8values (0-255). Many common Gym environments (e.g. Atari) do this. By default they will be floats (0.0-1.0). Defaults toFalse. -
multiagentrefers to whether you intent to launch an environment which contains more than one agent. Defaults toFalse. -
flatten_branchedwill flatten a branched discrete action space into a Gym Discrete. Otherwise, it will be converted into a MultiDiscrete. Defaults toFalse. -
allow_multiple_visual_obswill return a list of observation instead of only one if disabled. Defaults toFalse.
The returned environment env will function as a gym.
For more on using the gym interface, see our Jupyter Notebook tutorial.
Limitations
- It is only possible to use an environment with a single Agent.
- By default, the first visual observation is provided as the
observation, if present. Otherwise, vector observations are provided. You can receive all visual observations by using theallow_multiple_visual_obs=Trueoption in the gym parameters. If set toTrue, you will receive a list ofobservationinstead of only the first one. - The
BatchedStepResultoutput from the environment can still be accessed from theinfoprovided byenv.step(action). - Stacked vector observations are not supported.
- Environment registration for use with
gym.make()is currently not supported.
Running OpenAI Baselines Algorithms
OpenAI provides a set of open-source maintained and tested Reinforcement Learning algorithms called the Baselines.
Using the provided Gym wrapper, it is possible to train ML-Agents environments using these algorithms. This requires the creation of custom training scripts to launch each algorithm. In most cases these scripts can be created by making slight modifications to the ones provided for Atari and Mujoco environments.
These examples were tested with baselines version 0.1.6.
Example - DQN Baseline
In order to train an agent to play the GridWorld environment using the
Baselines DQN algorithm, you first need to install the baselines package using
pip:
pip install git+git://github.com/openai/baselines
Next, create a file called train_unity.py. Then create an /envs/ directory
and build the GridWorld environment to that directory. For more information on
building Unity environments, see
here. Add the following code to
the train_unity.py file:
import gym
from baselines import deepq
from baselines import logger
from gym_unity.envs import UnityEnv
def main():
env = UnityEnv("./envs/GridWorld", 0, use_visual=True, uint8_visual=True)
logger.configure('./logs') # Çhange to log in a different directory
act = deepq.learn(
env,
"cnn", # conv_only is also a good choice for GridWorld
lr=2.5e-4,
total_timesteps=1000000,
buffer_size=50000,
exploration_fraction=0.05,
exploration_final_eps=0.1,
print_freq=20,
train_freq=5,
learning_starts=20000,
target_network_update_freq=50,
gamma=0.99,
prioritized_replay=False,
checkpoint_freq=1000,
checkpoint_path='./logs', # Change to save model in a different directory
dueling=True
)
print("Saving model to unity_model.pkl")
act.save("unity_model.pkl")
if __name__ == '__main__':
main()
To start the training process, run the following from the directory containing
train_unity.py:
python -m train_unity
Other Algorithms
Other algorithms in the Baselines repository can be run using scripts similar to
the examples from the baselines package. In most cases, the primary changes needed
to use a Unity environment are to import UnityEnv, and to replace the environment
creation code, typically gym.make(), with a call to UnityEnv(env_path)
passing the environment binary path.
A typical rule of thumb is that for vision-based environments, modification should be done to Atari training scripts, and for vector observation environments, modification should be done to Mujoco scripts.
Some algorithms will make use of make_env() or make_mujoco_env()
functions. You can define a similar function for Unity environments. An example of
such a method using the PPO2 baseline:
from gym_unity.envs import UnityEnv
from baselines.common.vec_env.subproc_vec_env import SubprocVecEnv
from baselines.common.vec_env.dummy_vec_env import DummyVecEnv
from baselines.bench import Monitor
from baselines import logger
import baselines.ppo2.ppo2 as ppo2
import os
try:
from mpi4py import MPI
except ImportError:
MPI = None
def make_unity_env(env_directory, num_env, visual, start_index=0):
"""
Create a wrapped, monitored Unity environment.
"""
def make_env(rank, use_visual=True): # pylint: disable=C0111
def _thunk():
env = UnityEnv(env_directory, rank, use_visual=use_visual, uint8_visual=True)
env = Monitor(env, logger.get_dir() and os.path.join(logger.get_dir(), str(rank)))
return env
return _thunk
if visual:
return SubprocVecEnv([make_env(i + start_index) for i in range(num_env)])
else:
rank = MPI.COMM_WORLD.Get_rank() if MPI else 0
return DummyVecEnv([make_env(rank, use_visual=False)])
def main():
env = make_unity_env('./envs/GridWorld', 4, True)
ppo2.learn(
network="mlp",
env=env,
total_timesteps=100000,
lr=1e-3,
)
if __name__ == '__main__':
main()
Run Google Dopamine Algorithms
Google provides a framework Dopamine, and implementations of algorithms, e.g. DQN, Rainbow, and the C51 variant of Rainbow. Using the Gym wrapper, we can run Unity environments using Dopamine.
First, after installing the Gym wrapper, clone the Dopamine repository.
git clone https://github.com/google/dopamine
Then, follow the appropriate install instructions as specified on Dopamine's homepage. Note that the Dopamine guide specifies using a virtualenv. If you choose to do so, make sure your unity_env package is also installed within the same virtualenv as Dopamine.
Adapting Dopamine's Scripts
First, open dopamine/atari/run_experiment.py. Alternatively, copy the entire atari
folder, and name it something else (e.g. unity). If you choose the copy approach,
be sure to change the package names in the import statements in train.py to your new
directory.
Within run_experiment.py, we will need to make changes to which environment is
instantiated, just as in the Baselines example. At the top of the file, insert
from gym_unity.envs import UnityEnv
to import the Gym Wrapper. Navigate to the create_atari_environment method
in the same file, and switch to instantiating a Unity environment by replacing
the method with the following code.
game_version = 'v0' if sticky_actions else 'v4'
full_game_name = '{}NoFrameskip-{}'.format(game_name, game_version)
env = UnityEnv('./envs/GridWorld', 0, use_visual=True, uint8_visual=True)
return env
./envs/GridWorld is the path to your built Unity executable. For more information on
building Unity environments, see here, and note
the Limitations section below.
Note that we are not using the preprocessor from Dopamine, as it uses many Atari-specific calls. Furthermore, frame-skipping can be done from within Unity, rather than on the Python side.
Limitations
Since Dopamine is designed around variants of DQN, it is only compatible
with discrete action spaces, and specifically the Discrete Gym space. For environments
that use branched discrete action spaces (e.g.
VisualBanana), you can enable the
flatten_branched parameter in UnityEnv, which treats each combination of branched
actions as separate actions.
Furthermore, when building your environments, ensure that your Agent is using visual
observations with greyscale enabled, and that the dimensions of the visual observations
is 84 by 84 (matches the parameter found in dqn_agent.py and rainbow_agent.py).
Dopamine's agents currently do not automatically adapt to the observation
dimensions or number of channels.
Hyperparameters
The hyperparameters provided by Dopamine are tailored to the Atari games, and you will
likely need to adjust them for ML-Agents environments. Here is a sample
dopamine/agents/rainbow/configs/rainbow.gin file that is known to work with
GridWorld.
import dopamine.agents.rainbow.rainbow_agent
import dopamine.unity.run_experiment
import dopamine.replay_memory.prioritized_replay_buffer
import gin.tf.external_configurables
RainbowAgent.num_atoms = 51
RainbowAgent.stack_size = 1
RainbowAgent.vmax = 10.
RainbowAgent.gamma = 0.99
RainbowAgent.update_horizon = 3
RainbowAgent.min_replay_history = 20000 # agent steps
RainbowAgent.update_period = 5
RainbowAgent.target_update_period = 50 # agent steps
RainbowAgent.epsilon_train = 0.1
RainbowAgent.epsilon_eval = 0.01
RainbowAgent.epsilon_decay_period = 50000 # agent steps
RainbowAgent.replay_scheme = 'prioritized'
RainbowAgent.tf_device = '/cpu:0' # use '/cpu:*' for non-GPU version
RainbowAgent.optimizer = @tf.train.AdamOptimizer()
tf.train.AdamOptimizer.learning_rate = 0.00025
tf.train.AdamOptimizer.epsilon = 0.0003125
Runner.game_name = "Unity" # any name can be used here
Runner.sticky_actions = False
Runner.num_iterations = 200
Runner.training_steps = 10000 # agent steps
Runner.evaluation_steps = 500 # agent steps
Runner.max_steps_per_episode = 27000 # agent steps
WrappedPrioritizedReplayBuffer.replay_capacity = 1000000
WrappedPrioritizedReplayBuffer.batch_size = 32
This example assumed you copied atari to a separate folder named unity.
Replace unity in import dopamine.unity.run_experiment with the folder you
copied your run_experiment.py and trainer.py files to.
If you directly modified the existing files, then use atari here.
Starting a Run
You can now run Dopamine as you would normally:
python -um dopamine.unity.train \
--agent_name=rainbow \
--base_dir=/tmp/dopamine \
--gin_files='dopamine/agents/rainbow/configs/rainbow.gin'
Again, we assume that you've copied atari into a separate folder.
Remember to replace unity with the directory you copied your files into. If you
edited the Atari files directly, this should be atari.
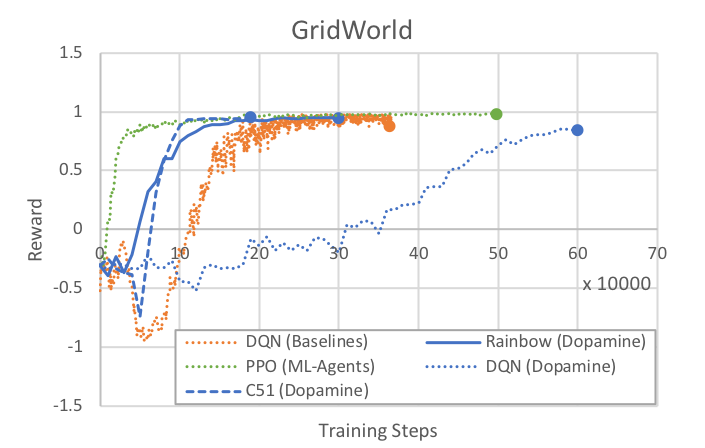
Example: GridWorld
As a baseline, here are rewards over time for the three algorithms provided with Dopamine as run on the GridWorld example environment. All Dopamine (DQN, Rainbow, C51) runs were done with the same epsilon, epsilon decay, replay history, training steps, and buffer settings as specified above. Note that the first 20000 steps are used to pre-fill the training buffer, and no learning happens.
We provide results from our PPO implementation and the DQN from Baselines as reference.
Note that all runs used the same greyscale GridWorld as Dopamine. For PPO, num_layers
was set to 2, and all other hyperparameters are the default for GridWorld in trainer_config.yaml.
For Baselines DQN, the provided hyperparameters in the previous section are used. Note
that Baselines implements certain features (e.g. dueling-Q) that are not enabled
in Dopamine DQN.
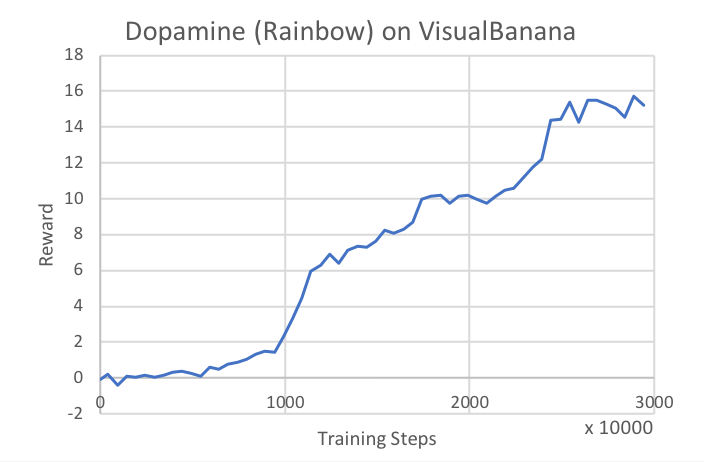
Example: VisualBanana
As an example of using the flatten_branched option, we also used the Rainbow
algorithm to train on the VisualBanana environment, and provide the results below.
The same hyperparameters were used as in the GridWorld case, except that
replay_history and epsilon_decay were increased to 100000.