# ML-Agents Overview
**Unity Machine Learning Agents** (ML-Agents) is an open-source Unity plugin
that enables games and simulations to serve as environments for training
intelligent agents. Agents can be trained using reinforcement learning,
imitation learning, neuroevolution, or other machine learning methods through
a simple-to-use Python API. We also provide implementations (based on
TensorFlow) of state-of-the-art algorithms to enable game developers
and hobbyists to easily train intelligent agents for 2D, 3D and VR/AR games.
These trained agents can be used for multiple purposes, including
controlling NPC behavior (in a variety of settings such as multi-agent and
adversarial), automated testing of game builds and evaluating different game
design decisions pre-release. ML-Agents is mutually beneficial for both game
developers and AI researchers as it provides a central platform where advances
in AI can be evaluated on Unity’s rich environments and then made accessible
to the wider research and game developer communities.
Depending on your background (i.e. researcher, game developer, hobbyist),
you may have very different questions on your mind at the moment.
To make your transition to ML-Agents easier, we provide several background
pages that include overviews and helpful resources on the
[Unity Engine](Background-Unity.md),
[machine learning](Background-Machine-Learning.md) and
[TensorFlow](Background-TensorFlow.md). We **strongly** recommend browsing
the relevant background pages if you're not familiar with a Unity scene,
basic machine learning concepts or have not previously heard of TensorFlow.
The remainder of this page contains a deep dive into ML-Agents, its key
components, different training modes and scenarios. By the end of it, you
should have a good sense of _what_ ML-Agents allows you to do. The subsequent
documentation pages provide examples of _how_ to use ML-Agents.
## Running Example: Training NPC Behaviors
To help explain the material and terminology in this page, we'll use a
hypothetical, running example throughout. We will explore the
problem of training the behavior of a non-playable character (NPC) in a game.
(An NPC is a game character that is never controlled by a human player and
its behavior is pre-defined by the game developer.) More specifically, let's
assume we're building a multi-player, war-themed game in which players control
the soldiers. In this game, we have a single NPC who serves as a medic, finding
and reviving wounded players. Lastly, let us assume that there
are two teams, each with five players and one NPC medic.
The behavior of a medic is quite complex. It first needs to avoid getting
injured, which requires detecting when it is in danger and moving to a safe
location. Second, it needs to be aware of which of its team members are
injured and require assistance. In the case of multiple injuries, it needs to
assess the degree of injury and decide who to help first. Lastly, a good
medic will always place itself in a position where it can quickly help its
team members. Factoring in all of these traits means that at every instance,
the medic needs to measure several attributes of the environment (e.g.
position of team members, position of enemies, which of its team members are
injured and to what degree) and then decide on an action (e.g. hide from enemy
fire, move to help one of its members). Given the large number of settings of
the environment and the large number of actions that the medic can take,
defining and implementing such complex behaviors by hand is challenging and
prone to errors.
With ML-Agents, it is possible to _train_ the behaviors of such NPCs
(called **agents**) using a variety of methods. The basic idea is quite simple.
We need to define three entities at every moment of the game
(called **environment**):
- **Observations** - what the medic perceives about the environment.
Observations can be numeric and/or visual. Numeric observations measure
attributes of the environment from the point of view of the agent. For
our medic this would be attributes of the battlefield that are visible to it.
Observations can either be _discrete_ or _continuous_ depending on the complexity
of the game and agent. For most interesting environments, an agent will require
several continuous numeric observations, while for simple environments with
a small number of unique configurations, a discrete observation will suffice.
Visual observations, on the other hand, are images generated from the cameras
attached to the agent and represent what the agent is seeing at that point
in time. It is common to confuse an agent's observation with the environment
(or game) **state**. The environment state represents information about the
entire scene containing all the game characters. The agents observation,
however, only contains information that the agent is aware of and is typically
a subset of the environment state. For example, the medic observation cannot
include information about an enemy in hiding that the medic is unaware of.
- **Actions** - what actions the medic can take. Similar
to observations, actions can either be continuous or discrete depending
on the complexity of the environment and agent. In the case of the medic,
if the environment is a simple grid world where only their location matters,
then a discrete action taking on one of four values (north, south, east, west)
suffices. However, if the environment is more complex and the medic can move
freely then using two continuous actions (one for direction and another
for speed) is more appropriate.
- **Reward signals** - a scalar value indicating how well the medic is doing.
Note that the reward signal need not be
provided at every moment, but only when the medic performs an action that is
good or bad. For example, it can receive a large negative reward if it dies,
a modest positive reward whenever it revives a wounded team member, and a
modest negative reward when a wounded team member dies due to lack of
assistance. Note that the reward signal is how the objectives of the task
are communicated to the agent, so they need to be set up in a manner where
maximizing reward generates the desired optimal behavior.
After defining these three entities (the building blocks of a
**reinforcement learning task**),
we can now _train_ the medic's behavior. This is achieved by simulating the
environment for many trials where the medic, over time, learns what is the
optimal action to take for every observation it measures by maximizing
its future reward. The key is that by learning the actions that maximize its
reward, the medic is learning the behaviors that make it a good medic (i.e.
one who saves the most number of lives). In **reinforcement learning**
terminology, the behavior that is learned is called a **policy**, which is
essentially a (optimal) mapping from observations to actions. Note that
the process of learning a policy through running simulations is called the
**training phase**, while playing the game with an NPC that is using its
learned policy is called the **inference phase**.
ML-Agents provides all the necessary tools for using Unity as the simulation
engine for learning the policies of different objects in a Unity environment.
In the next few sections, we discuss how ML-Agents achieves this and what
features it provides.
## Key Components
ML-Agents is a Unity plugin that contains three high-level components:
* **Learning Environment** - which contains the Unity scene and all the game
characters.
* **Python API** - which contains all the machine learning algorithms that are
used for training (learning a behavior or policy). Note that, unlike
the Learning Environment, the Python API is not part of Unity, but lives
outside and communicates with Unity through the External Communicator.
* **External Communicator** - which connects the Learning Environment
with the Python API. It lives within the Learning Environment.
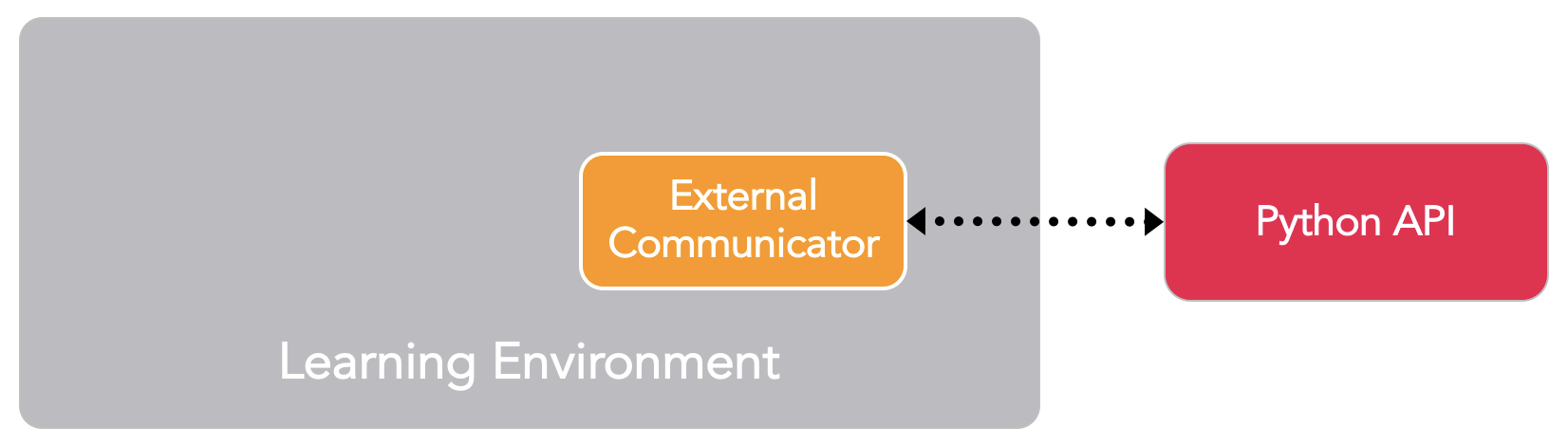
_Simplified block diagram of ML-Agents._
The Learning Environment contains three additional components that help
organize the Unity scene:
* **Agents** - which is attached to a Unity GameObject (any character within a
scene) and handles generating its observations, performing the actions it
receives and assigning a reward (positive / negative) when appropriate.
Each Agent is linked to exactly one Brain.
* **Brains** - which encapsulates the logic for making decisions for the Agent.
In essence, the Brain is what holds on to the policy for each Agent and
determines which actions the Agent should take at each instance. More
specifically, it is the component that receives the observations and rewards
from the Agent and returns an action.
* **Academy** - which orchestrates the observation and decision making process.
Within the Academy, several environment-wide parameters such as the rendering
quality and the speed at which the environment is run can be specified. The
External Communicator lives within the Academy.
Every Learning Environment will always have one global Academy and one Agent
for every character in the scene. While each Agent must be linked to a Brain,
it is possible for Agents that have similar observations and actions to be
linked to the same Brain. In our sample game, we have two teams each with
their own medic. Thus we will have two Agents in our Learning Environment,
one for each medic, but both of these medics can be linked to the same Brain.
Note that these two medics are linked to the same Brain because their _space_
of observations and actions are similar. This does not mean that at each
instance they will have identical observation and action _values_. In other
words, the Brain defines the space of all possible observations and actions,
while the Agents connected to it (in this case the medics) can each have
their own, unique observation and action values. If we expanded our game
to include tank driver NPCs, then the Agent attached to those characters
cannot share a Brain with the Agent linked to the medics (medics and drivers
have different actions).
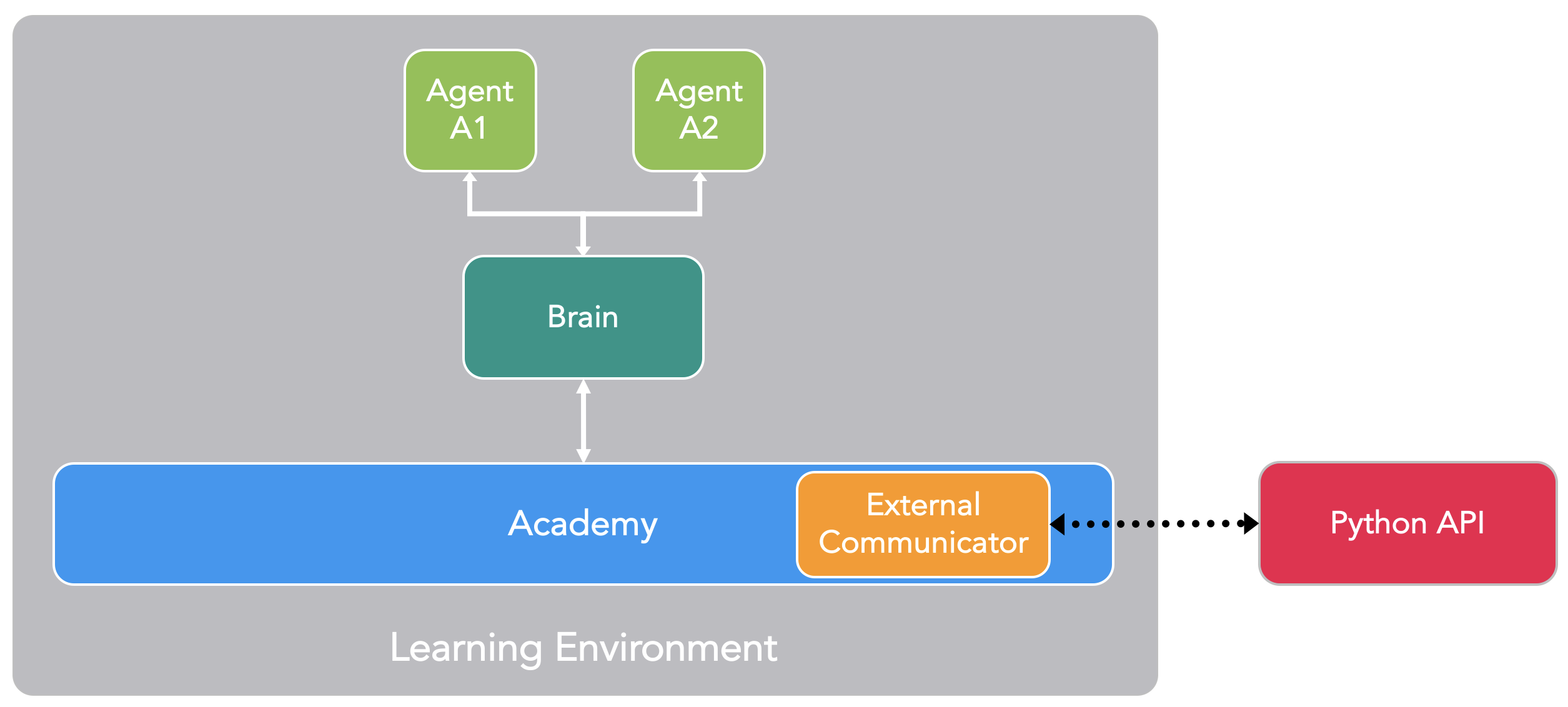
_Example block diagram of ML-Agents for our sample game._
We have yet to discuss how ML-Agents trains behaviors, and what role the
Python API and External Communicator play. Before we dive into those details,
let's summarize the earlier components. Each character is attached to an Agent,
and each Agent is linked to a Brain. The Brain receives observations and
rewards from the Agent and returns actions. The Academy ensures that all the
Agents and Brains are in sync in addition to controlling environment-wide
settings. So how does the Brain control what the Agent does?
In practice, we have four different types of Brains, which enable a wide
range of training and inference scenarios:
* **External** - where decisions are made using the Python API. Here, the
observations and rewards collected by the Brain are forwarded to the Python
API through the External Communicator. The Python API then returns the
corresponding action that needs to be taken by the Agent.
* **Internal** - where decisions are made using an embedded
[TensorFlow](Background-TensorFlow.md) model.
The embedded TensorFlow model represents a learned policy and the Brain
directly uses this model to determine the action for each Agent.
* **Player** - where decisions are made using real input from a keyboard or
controller. Here, a human player is controlling the Agent and the observations
and rewards collected by the Brain are not used to control the Agent.
* **Heuristic** - where decisions are made using hard-coded behavior. This
resembles how most character behaviors are currently defined and can be
helpful for debugging or comparing how an Agent with hard-coded rules compares
to an Agent whose behavior has been trained. In our example, once we have
trained a Brain for the medics we could assign a medic on one team to the
trained Brain and assign the medic on the other team a Heuristic Brain
with hard-coded behaviors. We can then evaluate which medic is more effective.
As currently described, it may seem that the External Communicator
and Python API are only leveraged by the External Brain. This is not true.
It is possible to configure the Internal, Player and Heuristic Brains to
also send the observations, rewards and actions to the Python API through
the External Communicator (a feature called _broadcasting_). As we will see
shortly, this enables additional training modes.

_An example of how a scene containing multiple Agents and Brains might be
configured._
## Training Modes
Given the flexibility of ML-Agents, there are a few ways in which training and
inference can proceed.
### Built-in Training and Inference
As mentioned previously, ML-Agents ships with several implementations of
state-of-the-art algorithms for training intelligent agents. In this mode, the
Brain type is set to External during training and Internal during inference.
More specifically, during training, all the medics in the scene send their
observations to the Python API through the External Communicator (this is the
behavior with an External Brain). The Python API processes these observations
and sends back actions for each medic to take. During training these actions
are mostly exploratory to help the Python API learn the best policy for each
medic. Once training concludes, the learned policy for each medic can be
exported. Given that all our implementations are based on TensorFlow, the
learned policy is just a TensorFlow model file. Then during the inference
phase, we switch the Brain type to Internal and include the TensorFlow model
generated from the training phase. Now during the inference phase, the medics
still continue to generate their observations, but instead of being sent to
the Python API, they will be fed into their (internal, embedded) model to
generate the _optimal_ action for each medic to take at every point in time.
To summarize: our built-in implementations are based on TensorFlow, thus,
during training the Python API uses the observations it receives to learn
a TensorFlow model. This model is then embedded within the Internal Brain
during inference to generate the optimal actions for all Agents linked to
that Brain. **Note that our Internal Brain is currently experimental as it
is limited to TensorFlow models and leverages the third-party
[TensorFlowSharp](https://github.com/migueldeicaza/TensorFlowSharp)
library.**
The
[Getting Started with the 3D Balance Ball Example](Getting-Started-with-Balance-Ball.md)
tutorial covers this training mode with the **3D Balance Ball** sample environment.
### Custom Training and Inference
In the previous mode, the External Brain type was used for training
to generate a TensorFlow model that the Internal Brain type can understand
and use. However, any user of ML-Agents can leverage their own algorithms
for both training and inference. In this case, the Brain type would be set
to External for both training and inferences phases and the behaviors of
all the Agents in the scene will be controlled within Python.
We do not currently have a tutorial highlighting this mode, but you can
learn more about the Python API [here](Python-API.md).
### Curriculum Learning
This mode is an extension of _Built-in Training and Inference_, and
is particularly helpful when training intricate behaviors for complex
environments. Curriculum learning is a way of training a machine learning
model where more difficult aspects of a problem are gradually introduced in
such a way that the model is always optimally challenged. This idea has been
around for a long time, and it is how we humans typically learn. If you
imagine any childhood primary school education, there is an ordering of
classes and topics. Arithmetic is taught before algebra, for example.
Likewise, algebra is taught before calculus. The skills and knowledge learned
in the earlier subjects provide a scaffolding for later lessons. The same
principle can be applied to machine learning, where training on easier tasks
can provide a scaffolding for harder tasks in the future.

_Example of a mathematics curriculum. Lessons progress from simpler topics to more
complex ones, with each building on the last._
When we think about how reinforcement learning actually works, the
learning signal is reward received occasionally throughout training.
The starting point when training an agent to accomplish this task will be a
random policy. That starting policy will have the agent running in circles,
and will likely never, or very rarely achieve the reward for complex
environments. Thus by simplifying the environment at the beginning of training,
we allow the agent to quickly update the random policy to a more meaningful
one that is successively improved as the environment gradually increases in
complexity. In our example, we can imagine first training the medic when each
team only contains one player, and then iteratively increasing the number of
players (i.e. the environment complexity). ML-Agents supports setting
custom environment parameters within the Academy. This allows
elements of the environment related to difficulty or complexity to be
dynamically adjusted based on training progress.
The [Curriculum Learning](Training-Curriculum-Learning.md)
tutorial covers this training mode with the **Wall Area** sample environment.
### Imitation Learning
It is often more intuitive to simply demonstrate the behavior we
want an agent to perform, rather than attempting to have it learn via
trial-and-error methods. For example, instead of training the medic by
setting up its reward function, this mode allows providing real examples from
a game controller on how the medic should behave. More specifically,
in this mode, the Brain type during training is set to Player and all the
actions performed with the controller (in addition to the agent observations)
will be recorded and sent to the Python API. The imitation learning algorithm
will then use these pairs of observations and actions from the human player
to learn a policy.
The [Imitation Learning](Training-Imitation-Learning.md) tutorial covers this
training mode with the **Banana Collector** sample environment.
## Flexible Training Scenarios
While the discussion so-far has mostly focused on training a single agent, with
ML-Agents, several training scenarios are possible.
We are excited to see what kinds of novel and fun environments the community
creates. For those new to training intelligent agents, below are a few examples
that can serve as inspiration:
* Single-Agent. A single Agent linked to a single Brain, with its own reward
signal. The traditional way of training an agent. An example is any
single-player game, such as Chicken.
[Video Link](https://www.youtube.com/watch?v=fiQsmdwEGT8&feature=youtu.be).
* Simultaneous Single-Agent. Multiple independent Agents with independent
reward signals linked to a single Brain. A parallelized version of the
traditional training scenario, which can speed-up and stabilize the training
process. Helpful when you have multiple versions of the same character in an
environment who should learn similar behaviors. An example might be training
a dozen robot-arms to each open a door simultaneously.
[Video Link](https://www.youtube.com/watch?v=fq0JBaiCYNA).
* Adversarial Self-Play. Two interacting Agents with inverse reward signals
linked to a single Brain. In two-player games, adversarial self-play can allow
an agent to become increasingly more skilled, while always having the perfectly
matched opponent: itself. This was the strategy employed when training AlphaGo,
and more recently used by OpenAI to train a human-beating 1-vs-1 Dota 2 agent.
* Cooperative Multi-Agent. Multiple interacting Agents with a shared reward
signal linked to either a single or multiple different Brains. In this
scenario, all agents must work together to accomplish a task that cannot be
done alone. Examples include environments where each agent only has access to
partial information, which needs to be shared in order to accomplish the task
or collaboratively solve a puzzle.
* Competitive Multi-Agent. Multiple interacting Agents with inverse reward
signals linked to either a single or multiple different Brains. In this
scenario, agents must compete with one another to either win a competition,
or obtain some limited set of resources. All team sports fall into this
scenario.
* Ecosystem. Multiple interacting Agents with independent reward signals
linked to either a single or multiple different Brains. This scenario can be
thought of as creating a small world in which animals with different goals all
interact, such as a savanna in which there might be zebras, elephants and
giraffes, or an autonomous driving simulation within an urban environment.
## Additional Features
Beyond the flexible training scenarios available, ML-Agents includes
additional features which improve the flexibility and interpretability of the
training process.
* **On Demand Decision Making** - With ML-Agents it is possible to have agents
request decisions only when needed as opposed to requesting decisions at
every step of the environment. This enables training of turn based games,
games where agents
must react to events or games where agents can take actions of variable
duration. Switching between decision taking at every step and
on-demand-decision is one button click away. You can learn more about the
on-demand-decision feature [here](Feature-On-Demand-Decision.md).
* **Memory-enhanced Agents** - In some scenarios, agents must learn to
remember the past in order to take the
best decision. When an agent only has partial observability of the environment,
keeping track of past observations can help the agent learn. We provide an
implementation of _Long Short-term Memory_
([LSTM](https://en.wikipedia.org/wiki/Long_short-term_memory))
in our trainers that enable the agent to store memories to be used in future
steps. You can learn more about enabling LSTM during training
[here](Feature-Memory.md).
* **Monitoring Agent’s Decision Making** - Since communication in ML-Agents
is a two-way street, we provide an agent Monitor class in Unity which can
display aspects of the trained agent, such as the agents perception on how
well it is doing (called **value estimates**) within the Unity environment
itself. By leveraging Unity as a visualization tool and providing these
outputs in real-time, researchers and developers can more easily debug an
agent’s behavior. You can learn more about using the Monitor class
[here](Feature-Monitor.md).
* **Complex Visual Observations** - Unlike other platforms, where the agent’s
observation might be limited to a single vector or image, ML-Agents allows
multiple cameras to be used for observations per agent. This enables agents to
learn to integrate information from multiple visual streams. This can be
helpful in several scenarios such as training a self-driving car which requires
multiple cameras with different viewpoints, or a navigational agent which might
need to integrate aerial and first-person visuals. You can learn more about
adding visual observations to an agent
[here](Learning-Environment-Design-Agents.md#visual-observations).
* **Broadcasting** - As discussed earlier, an External Brain sends the
observations for all its Agents to the Python API by default. This is helpful
for training or inference. Broadcasting is a feature which can be enabled
for the other three modes (Player, Internal, Heuristic) where the Agent
observations and actions are also sent to the Python API (despite the fact
that the Agent is **not** controlled by the Python API). This feature is
leveraged by Imitation Learning, where the observations and actions for a
Player Brain are used to learn the policies of an agent through demonstration.
However, this could also be helpful for the Heuristic and Internal Brains,
particularly when debugging agent behaviors. You can learn more about using
the broadcasting feature [here](Feature-Broadcasting.md).
## Summary and Next Steps
To briefly summarize: ML-Agents enables games and simulations built in Unity
to serve as the platform for training intelligent agents. It is designed
to enable a large variety of training modes and scenarios and comes packed
with several features to enable researchers and developers to leverage
(and enhance) machine learning within Unity.
To help you use ML-Agents, we've created several in-depth tutorials
for [installing ML-Agents](Installation.md),
[getting started](Getting-Started-with-Balance-Ball.md)
with the 3D Balance Ball environment (one of our many
[sample environments](Learning-Environment-Examples.md)) and
[making your own environment](Learning-Environment-Create-New.md).