|
|
|
|
|
|
|
succeed at all. |
|
|
|
|
|
|
|
Visual observations can be derived from Cameras or RenderTextures within your scene. |
|
|
|
To add a visual observation to an Agent, either click on the `Add Camera` or |
|
|
|
`Add RenderTexture` button in the Agent inspector. Then drag the camera or |
|
|
|
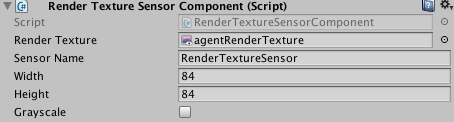
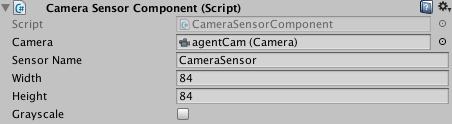
To add a visual observation to an Agent, add either a Camera Sensor Component |
|
|
|
or RenderTextures Sensor Component to the Agent. Then drag the camera or |
|
|
|
of both attached to an Agent. |
|
|
|
of both attached to an Agent. For each visual observation, set the width and height |
|
|
|
of the image (in pixels) and whether or not the observation is color or grayscale. |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
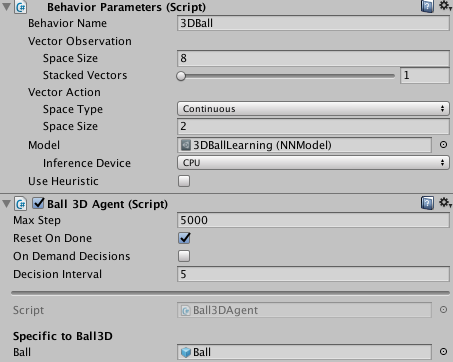
In addition, make sure that the Agent's Policy expects a visual observation. In |
|
|
|
the Agent inspector, under **Behavior Parameters** > **Visual Observations**, |
|
|
|
specify the number of Resolutions the Agent is using for its visual observations. |
|
|
|
For each visual observation, set the width and height of the image (in pixels) |
|
|
|
and whether or not the observation is color or grayscale (when `Black And White` |
|
|
|
is checked). |
|
|
|
|
|
|
|
For instance, if you are using two cameras and one render texture on your Agent, |
|
|
|
three **Visual Observations** have to be added to the **Behavior Parameters**. |
|
|
|
During runtime, if a combination of `Cameras` and `RenderTextures` is used, all |
|
|
|
cameras are captured first, then all render textures will be added, in the |
|
|
|
order they appear in the editor. |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
RenderTexture observations will throw an `Exception` if the width/height doesn't |
|
|
|
match the resolution specified under **Behavior Parameters** > **Visual Observations**. |
|
|
|
Each Agent that uses the same Policy must have the same number of visual observations, |
|
|
|
and they must all have the same resolutions (including whether or not they are grayscale). |
|
|
|
Additionally, each Sensor Component on an Agent must have a unique name so that they can |
|
|
|
be sorted deterministically (the name must be unique for that Agent, but multiple Agents can |
|
|
|
have a Sensor Component with the same name). |
|
|
|
|
|
|
|
When using `RenderTexture` visual observations, a handy feature for debugging is |
|
|
|
adding a `Canvas`, then adding a `Raw Image` with it's texture set to the Agent's |
|
|
|
|
|
|
|
|
|
|
|
## Agent Properties |
|
|
|
|
|
|
|
 |
|
|
|
 |
|
|
|
|
|
|
|
* `Behavior Parameters` - The parameters dictating what Policy the Agent will |
|
|
|
receive. |
|
|
|
|
|
|
|
be stacked and used collectively for decision making. This results in the |
|
|
|
effective size of the vector observation being passed to the Policy being: |
|
|
|
_Space Size_ x _Stacked Vectors_. |
|
|
|
* `Visual Observations` - Describes height, width, and whether to grayscale |
|
|
|
visual observations for the Policy. |
|
|
|
* `Vector Action` |
|
|
|
* `Space Type` - Corresponds to whether action vector contains a single |
|
|
|
integer (Discrete) or a series of real-valued floats (Continuous). |
|
|
|
|
|
|
|
* `Inference Device` - Whether to use CPU or GPU to run the model during inference |
|
|
|
* `Use Heuristic` - If checked, the Agent will use its 'Heuristic()' method for |
|
|
|
decisions. |
|
|
|
* `Visual Observations` - A list of `Cameras` or `RenderTextures` which will |
|
|
|
be used to generate observations. |
|
|
|
* `Max Step` - The per-agent maximum number of steps. Once this number is |
|
|
|
reached, the Agent will be reset if `Reset On Done` is checked. |
|
|
|
* `Reset On Done` - Whether the Agent's `AgentReset()` function should be called |
|
|
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}