当前提交
5e980ec1
共有 131 个文件被更改,包括 6269 次插入 和 5295 次删除
-
2.yamato/gym-interface-test.yml
-
4.yamato/protobuf-generation-test.yml
-
5.yamato/python-ll-api-test.yml
-
8.yamato/standalone-build-test.yml
-
11.yamato/training-int-tests.yml
-
22Project/Assets/ML-Agents/Examples/3DBall/Prefabs/3DBallHardNew.prefab
-
936Project/Assets/ML-Agents/Examples/Basic/Prefabs/Basic.prefab
-
928Project/Assets/ML-Agents/Examples/Bouncer/Prefabs/Environment.prefab
-
22Project/Assets/ML-Agents/Examples/Crawler/Prefabs/DynamicPlatform.prefab
-
13Project/Assets/ML-Agents/Examples/Crawler/Prefabs/FixedPlatform.prefab
-
153Project/Assets/ML-Agents/Examples/FoodCollector/Prefabs/FoodCollectorArea.prefab
-
32Project/Assets/ML-Agents/Examples/GridWorld/Prefabs/Area.prefab
-
43Project/Assets/ML-Agents/Examples/Hallway/Prefabs/SymbolFinderArea.prefab
-
64Project/Assets/ML-Agents/Examples/PushBlock/Prefabs/PushBlockArea.prefab
-
85Project/Assets/ML-Agents/Examples/Pyramids/Prefabs/AreaPB.prefab
-
22Project/Assets/ML-Agents/Examples/Reacher/Prefabs/Agent.prefab
-
6Project/Assets/ML-Agents/Examples/SharedAssets/Scripts/ModelOverrider.cs
-
4Project/Assets/ML-Agents/Examples/SharedAssets/Scripts/ProjectSettingsOverrides.cs
-
3Project/Assets/ML-Agents/Examples/SharedAssets/Scripts/SensorBase.cs
-
256Project/Assets/ML-Agents/Examples/Soccer/Prefabs/SoccerFieldTwos.prefab
-
44Project/Assets/ML-Agents/Examples/Tennis/Prefabs/TennisArea.prefab
-
7Project/Assets/ML-Agents/Examples/Tennis/Scripts/TennisAgent.cs
-
22Project/Assets/ML-Agents/Examples/Walker/Prefabs/WalkerPair.prefab
-
64Project/Assets/ML-Agents/Examples/WallJump/Prefabs/WallJumpArea.prefab
-
3Project/ProjectSettings/GraphicsSettings.asset
-
2Project/ProjectSettings/UnityConnectSettings.asset
-
2README.md
-
7com.unity.ml-agents/CHANGELOG.md
-
24com.unity.ml-agents/Runtime/Academy.cs
-
35com.unity.ml-agents/Runtime/Agent.cs
-
5com.unity.ml-agents/Runtime/Communicator/RpcCommunicator.cs
-
34com.unity.ml-agents/Runtime/DecisionRequester.cs
-
3com.unity.ml-agents/Runtime/Sensors/CameraSensor.cs
-
6com.unity.ml-agents/Runtime/Sensors/ISensor.cs
-
3com.unity.ml-agents/Runtime/Sensors/RayPerceptionSensor.cs
-
3com.unity.ml-agents/Runtime/Sensors/RenderTextureSensor.cs
-
13com.unity.ml-agents/Runtime/Sensors/StackingSensor.cs
-
6com.unity.ml-agents/Runtime/Sensors/VectorSensor.cs
-
44com.unity.ml-agents/Runtime/SideChannels/IncomingMessage.cs
-
69com.unity.ml-agents/Runtime/Timer.cs
-
59com.unity.ml-agents/Tests/Editor/MLAgentsEditModeTest.cs
-
1com.unity.ml-agents/Tests/Editor/ParameterLoaderTest.cs
-
102com.unity.ml-agents/Tests/Editor/PublicAPI/PublicApiValidation.cs
-
1com.unity.ml-agents/Tests/Editor/Sensor/FloatVisualSensorTests.cs
-
1com.unity.ml-agents/Tests/Editor/Sensor/SensorShapeValidatorTests.cs
-
18com.unity.ml-agents/Tests/Editor/Sensor/StackingSensorTests.cs
-
26com.unity.ml-agents/Tests/Editor/SideChannelTests.cs
-
2com.unity.ml-agents/Tests/Editor/TimerTest.cs
-
16com.unity.ml-agents/package.json
-
3docs/Getting-Started.md
-
10docs/ML-Agents-Overview.md
-
4docs/Migrating.md
-
141docs/Python-API.md
-
10docs/Training-ML-Agents.md
-
11docs/Training-PPO.md
-
11docs/Training-SAC.md
-
999docs/images/3dball_big.png
-
852docs/images/3dball_small.png
-
974docs/images/curriculum.png
-
150docs/images/demo_component.png
-
980docs/images/gridworld.png
-
999docs/images/ml-agents-LSTM.png
-
181docs/images/monitor.png
-
219docs/images/platform_prefab.png
-
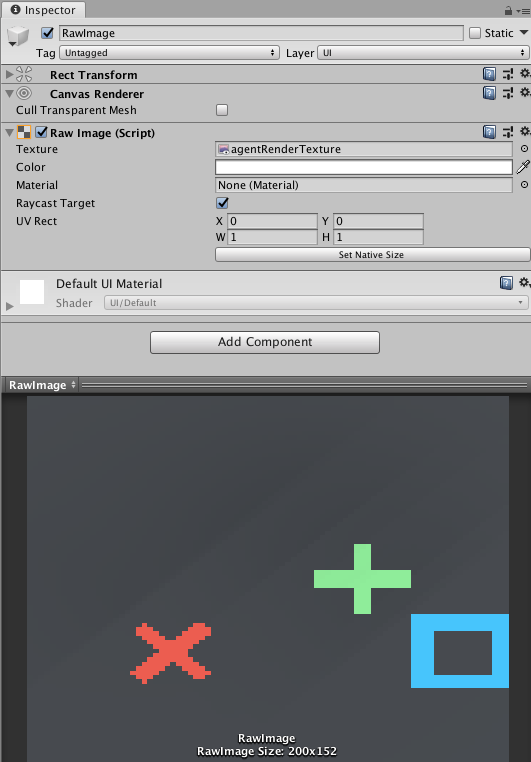
349docs/images/visual-observation-rawimage.png
-
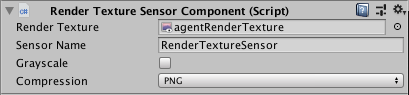
95docs/images/visual-observation-rendertexture.png
-
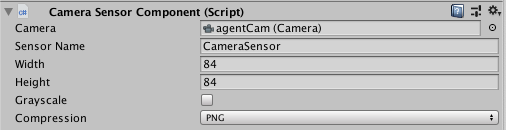
107docs/images/visual-observation.png
-
15gym-unity/README.md
-
342gym-unity/gym_unity/envs/__init__.py
-
198gym-unity/gym_unity/tests/test_gym.py
-
249ml-agents-envs/mlagents_envs/base_env.py
-
104ml-agents-envs/mlagents_envs/environment.py
-
99ml-agents-envs/mlagents_envs/rpc_utils.py
-
38ml-agents-envs/mlagents_envs/side_channel/incoming_message.py
-
43ml-agents-envs/mlagents_envs/tests/test_envs.py
-
170ml-agents-envs/mlagents_envs/tests/test_rpc_utils.py
-
20ml-agents-envs/mlagents_envs/tests/test_side_channel.py
-
7ml-agents-envs/mlagents_envs/tests/test_timers.py
-
39ml-agents-envs/mlagents_envs/timers.py
-
180ml-agents/mlagents/trainers/agent_processor.py
-
16ml-agents/mlagents/trainers/brain_conversion_utils.py
-
73ml-agents/mlagents/trainers/demo_loader.py
-
37ml-agents/mlagents/trainers/env_manager.py
-
55ml-agents/mlagents/trainers/ghost/trainer.py
-
32ml-agents/mlagents/trainers/learn.py
-
10ml-agents/mlagents/trainers/policy/nn_policy.py
-
4ml-agents/mlagents/trainers/policy/policy.py
-
81ml-agents/mlagents/trainers/policy/tf_policy.py
-
4ml-agents/mlagents/trainers/ppo/trainer.py
-
4ml-agents/mlagents/trainers/sac/trainer.py
-
26ml-agents/mlagents/trainers/simple_env_manager.py
-
24ml-agents/mlagents/trainers/subprocess_env_manager.py
-
42ml-agents/mlagents/trainers/tests/mock_brain.py
-
137ml-agents/mlagents/trainers/tests/simple_test_envs.py
-
54ml-agents/mlagents/trainers/tests/test_agent_processor.py
-
32ml-agents/mlagents/trainers/tests/test_demo_loader.py
-
12ml-agents/mlagents/trainers/tests/test_ghost.py
-
2ml-agents/mlagents/trainers/tests/test_learn.py
-
55ml-agents/mlagents/trainers/tests/test_nn_policy.py
-
24ml-agents/mlagents/trainers/tests/test_policy.py
936
Project/Assets/ML-Agents/Examples/Basic/Prefabs/Basic.prefab
文件差异内容过多而无法显示
查看文件
文件差异内容过多而无法显示
查看文件
928
Project/Assets/ML-Agents/Examples/Bouncer/Prefabs/Environment.prefab
文件差异内容过多而无法显示
查看文件
文件差异内容过多而无法显示
查看文件
|
|||
{ |
|||
"name": "com.unity.ml-agents", |
|||
"displayName":"ML Agents", |
|||
"version": "0.15.0-preview", |
|||
"unity": "2018.4", |
|||
"description": "Add interactivity to your game with Machine Learning Agents trained using Deep Reinforcement Learning.", |
|||
"dependencies": { |
|||
"com.unity.barracuda": "0.6.1-preview" |
|||
} |
|||
"name": "com.unity.ml-agents", |
|||
"displayName": "ML Agents", |
|||
"version": "0.15.1-preview", |
|||
"unity": "2018.4", |
|||
"description": "Add interactivity to your game with Machine Learning Agents trained using Deep Reinforcement Learning.", |
|||
"dependencies": { |
|||
"com.unity.barracuda": "0.6.1-preview" |
|||
} |
|||
} |
|||
999
docs/images/3dball_big.png
文件差异内容过多而无法显示
查看文件
文件差异内容过多而无法显示
查看文件
{kind=link}
{kind=link}
| 之前 | 之后 |
|---|---|
|
|
|
| 宽度: 906 | 高度: 759 | 大小: 165 KiB |
{kind=link}
| 之前 | 之后 |
|---|---|
|
|

|
| 宽度: 2066 | 高度: 342 | 大小: 152 KiB |
{kind=link}
| 之前 | 之后 |
|---|---|
|
|

|
| 宽度: 505 | 高度: 94 | 大小: 15 KiB |
{kind=link}
| 之前 | 之后 |
|---|---|
|
|
|
| 宽度: 1064 | 高度: 725 | 大小: 84 KiB |
999
docs/images/ml-agents-LSTM.png
文件差异内容过多而无法显示
查看文件
文件差异内容过多而无法显示
查看文件
{kind=link}
{kind=link}
| 之前 | 之后 |
|---|---|
|
|
|
| 宽度: 961 | 高度: 745 | 大小: 33 KiB |
{kind=link}
| 之前 | 之后 |
|---|---|
|
|
|
| 宽度: 285 | 高度: 121 | 大小: 8.8 KiB |
{kind=link}
| 之前 | 之后 |
|---|---|
|
|
|
| 宽度: 531 | 高度: 762 | 大小: 59 KiB |
{kind=link}
| 之前 | 之后 |
|---|---|
|
|
|
| 宽度: 409 | 高度: 95 | 大小: 14 KiB |
{kind=link}
| 之前 | 之后 |
|---|---|
|
|
|
| 宽度: 506 | 高度: 130 | 大小: 18 KiB |
部分文件因为文件数量过多而无法显示
撰写
预览
正在加载...
取消
保存
Reference in new issue