|
|
|
|
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
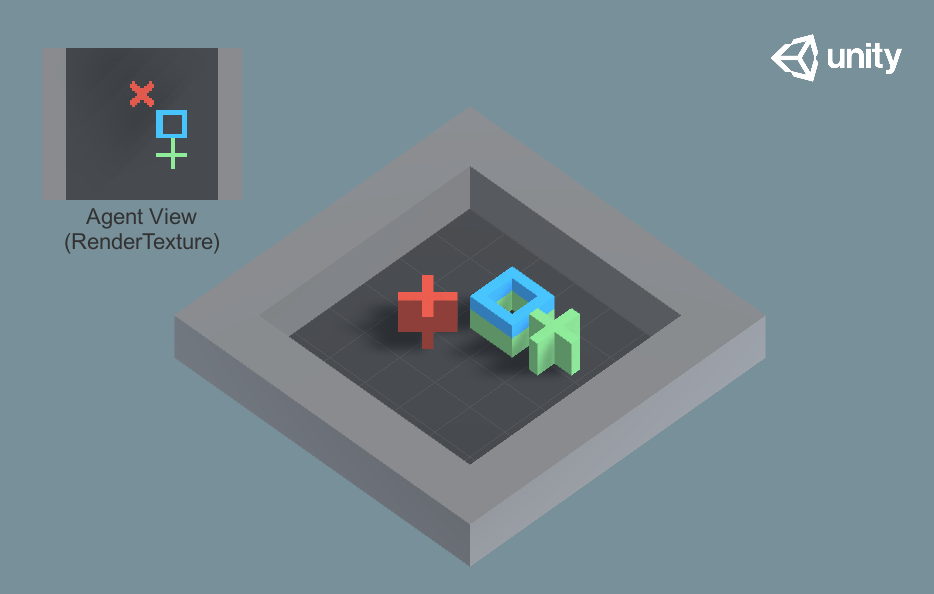
- Set-up: A version of the classic grid-world task. Scene contains agent, goal, |
|
|
|
- Set-up: A version of the grid-world task. Scene contains agent, goal, |
|
|
|
- Goal: The agent must navigate the grid to the goal while avoiding the |
|
|
|
obstacles. |
|
|
|
- Goal: The agent must navigate the grid to the appropriate goal while |
|
|
|
avoiding the obstacles. |
|
|
|
- +1.0 if the agent navigates to the goal position of the grid (episode ends). |
|
|
|
- -1.0 if the agent navigates to an obstacle (episode ends). |
|
|
|
- +1.0 if the agent navigates to the correct goal (episode ends). |
|
|
|
- -1.0 if the agent navigates to an incorrect goal (episode ends). |
|
|
|
- Behavior Parameters: |
|
|
|
- Vector Observation space: None |
|
|
|
- Actions: 1 discrete action branch with 5 actions, corresponding to movement in |
|
|
|
|
|
|
|
checkbox within the `trueAgent` GameObject). The trained model file provided |
|
|
|
was generated with action masking turned on. |
|
|
|
- Visual Observations: One corresponding to top-down view of GridWorld. |
|
|
|
- Float Properties: Three, corresponding to grid size, number of obstacles, and |
|
|
|
number of goals. |
|
|
|
- Goal Signal : A one hot vector corresponding to which color is the correct goal |
|
|
|
for the Agent |
|
|
|
- Float Properties: Three, corresponding to grid size, number of green goals, and |
|
|
|
number of red goals. |
|
|
|
- Benchmark Mean Reward: 0.8 |
|
|
|
|
|
|
|
## Push Block |
|
|
|
|
{kind=link}