1. Right click in Hierarchy window, select 3D Object > Plane.
1. Name the GameObject "Floor."
1. Name the GameObject "Floor".
1. Select the Floor Plane to view its properties in the Inspector window.
1. Set Transform to Position = `(0, 0, 0)`, Rotation = `(0, 0, 0)`, Scale =
`(1, 1, 1)`.
### Add the Target Cube
1. Right click in Hierarchy window, select 3D Object > Cube.
1. Name the GameObject "Target"
1. Name the GameObject "Target".
1. Select the Target Cube to view its properties in the Inspector window.
1. Set Transform to Position = `(3, 0.5, 3)`, Rotation = `(0, 0, 0)`, Scale =
`(1, 1, 1)`.
### Add the Agent Sphere
1. Right click in Hierarchy window, select 3D Object > Sphere.
1. Name the GameObject "RollerAgent"
1. Name the GameObject "RollerAgent".
1. Select the RollerAgent Sphere to view its properties in the Inspector window.
1. Set Transform to Position = `(0, 0.5, 0)`, Rotation = `(0, 0, 0)`, Scale =
`(1, 1, 1)`.
<palign="left">
<imgsrc="images/roller-ball-agent.png"
alt="The Agent GameObject in the Inspector window"
width="400" border="10" />
</p>
### Group into Training Area
Note that the screenshot above includes the `Roller Agent` script, which we will
create in the next section. However, before we do that, we'll first group the
floor, target and agent under a single, empty, GameObject. This will simplify
Group the floor, target and agent under a single, empty, GameObject. This will simplify
<palign="left">
<imgsrc="images/roller-ball-hierarchy.png"
alt="The Hierarchy window"
width="250" border="10" />
</p>
To do so:
1. Drag the Floor, Target, and RollerAgent GameObjects in the Hierarchy into the
TrainingArea GameObject.
<palign="left">
<imgsrc="images/roller-ball-hierarchy.png"
alt="The Hierarchy window"
width="250" border="10" />
</p>
To create the Agent:
To create the Agent Script:
1. Select the RollerAgent GameObject to view it in the Inspector window.
1. Click **Add Component**.
1. In the Unity Project window, double-click the `RollerAgent` script to open it
in your code editor.
1. In the editor, add the `using Unity.MLAgents;` and
`using Unity.MLAgents.Sensors;` statements and then change the base class from
`MonoBehaviour` to `Agent`.
1. Delete the `Update()` method, but we will use the `Start()` function, so
leave it alone for now.
1. Import ML-Agent package by adding
```csharp
using Unity.MLAgents;
using Unity.MLAgents.Sensors;
using Unity.MLAgents.Actuators;
```
then change the base class from `MonoBehaviour` to `Agent`.
1. Delete `Update()` since we are not using it, but keep `Start()`.
So far, these are the basic steps that you would use to add ML-Agents to any
Unity project. Next, we will add the logic that will let our Agent learn to roll
the Agent (Sphere) attempts to solve the task. Each episode lasts until the
Agents solves the task (i.e. reaches the cube), fails (rolls off the platform)
or times out (takes too long to solve or fail at the task). At the start of each
episode, the `OnEpisodeBegin()` method is called to set-up the environment for a
episode, `OnEpisodeBegin()` is called to set-up the environment for a
In this example, each time the Agent (Sphere) reaches its target (Cube), its
episode ends and the method moves the target (Cube) to a new random location. In
addition, if the Agent rolls off the platform, the `OnEpisodeBegin()` method
puts it back onto the floor.
In this example, each time the Agent (Sphere) reaches its target (Cube), the
episode ends and the target (Cube) is moved to a new random location; and if
the Agent rolls off the platform, it will be put back onto the floor.
These are all handled in `OnEpisodeBegin()`.
To move the target (Cube), we need a reference to its Transform (which stores a
GameObject's position, orientation and scale in the 3D world). To get this
public Transform Target;
public override void OnEpisodeBegin()
{
// If the Agent fell, zero its momentum
// If the Agent fell, zero its momentum
this.rBody.angularVelocity = Vector3.zero;
this.rBody.velocity = Vector3.zero;
this.transform.localPosition = new Vector3( 0, 0.5f, 0);
#### Actions
To solve the task of moving towards the target, the Agent (Sphere) needs to be
able to move in the `x` and `z` directions. As such, we will provide 2 actions
to the agent. The first determines the force applied along the x-axis; the
able to move in the `x` and `z` directions. As such, the agent needs 2 actions:
the first determines the force applied along the x-axis; and the
to move in three dimensions, then we would need a third action.
to move in three dimensions, then we would need a third action.)
component,`rBody`, using the `Rigidbody.AddForce` function:
component `rBody`, using `Rigidbody.AddForce()`:
```csharp
Vector3 controlSignal = Vector3.zero;
#### Rewards
Reinforcement learning requires rewards. Assign rewards in the
`OnActionReceived()` function. The learning algorithm uses the rewards assigned
to the Agent during the simulation and learning process to determine whether it
Reinforcement learning requires rewards to signal which decisions are good and
which are bad. The learning algorithm uses the rewards to determine whether it
The RollerAgent calculates the distance to detect when it reaches the target.
When it does, the code calls the `Agent.SetReward()` method to assign a reward
of 1.0 and marks the agent as finished by calling the `EndEpisode()` method on
Rewards are assigned in `OnActionReceived()`. The RollerAgent
calculates the distance to detect when it reaches the target.
When it does, the code calls `Agent.SetReward()` to assign a reward
of 1.0 and marks the agent as finished by calling `EndEpisode()` on
the Agent.
```csharp
#### OnActionReceived()
With the action and reward logic outlined above, the final version of the
`OnActionReceived()`function looks like:
With the action and reward logic outlined above, the final version of
`OnActionReceived()` looks like:
```csharp
public float forceMultiplier = 10;
}
```
Note the `forceMultiplier` class variable is defined before the function. Since `forceMultiplier` is
public, you can set the value from the Inspector window.
Note the `forceMultiplier` class variable is defined before the method definition.
Since `forceMultiplier` is public, you can set the value from the Inspector window.
## Final Editor Setup
## Final Agent Setup in Editor
Now, that all the GameObjects and ML-Agent components are in place, it is time
to connect everything together in the Unity Editor. This involves changing some
of the Agent Component's properties so that they are compatible with our Agent
code.
Now that all the GameObjects and ML-Agent components are in place, it is time
to connect everything together in the Unity Editor. This involves adding and
setting some of the Agent Component's properties so that they are compatible
with our Agent script.
1. Add the `Decision Requester` script with the Add Component button from the
RollerAgent Inspector.
1. Change **Decision Period** to `10`. For more information on decisions, see [the Agent documentation](Learning-Environment-Design-Agents.md#decisions)
1. Add the `Behavior Parameters` script with the Add Component button from the
RollerAgent Inspector.
1. Modify the Behavior Parameters of the Agent :
- `Behavior Name` to _RollerBall_
1. Add a `Decision Requester` script with the **Add Component** button.
Set the **Decision Period** to `10`. For more information on decisions,
see [the Agent documentation](Learning-Environment-Design-Agents.md#decisions)
1. Add a `Behavior Parameters` script with the **Add Component** button.
Set the Behavior Parameters of the Agent to the following:
- `Behavior Name`: _RollerBall_
- `Vector Action` > `Space Type` = **Continuous**
- `Vector Action` > `Space Size` = 2
- `Actions` > `Continuous Actions` = 2
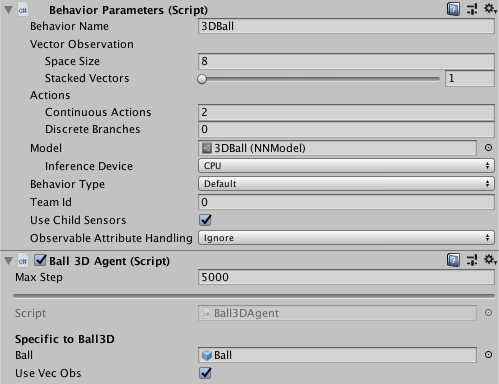
In the inspector, the `RollerAgent` should look like this now:
<palign="left">
<imgsrc="images/roller-ball-agent.png"
alt="The Agent GameObject in the Inspector window"
width="400" border="5" />
</p>
Now you are ready to test the environment before training.
{kind=link}
{kind=link}
{kind=link}
