|
|
|
|
|
|
|
# Windows �����ڸ� ���� ML-Agents Toolkit ��ġ ���� |
|
|
|
|
|
|
|
ML-Agents toolkit�� Windows 10�� �����մϴ�. �ٸ� ������ Windows ���ε� ML-Agents toolkit�� |
|
|
|
������ �� ������ �������� �ʾҽ��ϴ�. ����, ML-Agents toolkit�� Windows VM(Bootcamp �Ǵ� ���� ó�� |
|
|
|
ȯ�� ����)�� ���� ���� �������� �ʾҽ��ϴ� . |
|
|
|
|
|
|
|
ML-Agents toolkit�� �����ϱ� ����, �Ʒ��� �����Ȱ� ó�� Python�� �䱸�Ǵ� Python ��Ű���� ��ġ�ؾ� �մϴ�. |
|
|
|
�� ���̵��� ���� GPU ���� �н�(�����ڸ� ����)�� ���� ���� ������ �ٷ��ϴ�. |
|
|
|
����, ML-Agents toolkit�� ���� GPU ���� �н��� �ʿ����� ������ ���� ���� �Ǵ� Ư�� ���� �ʿ��� �� �ֽ��ϴ�. |
|
|
|
|
|
|
|
## �ܰ� 1: Anaconda�� ���� Python ��ġ |
|
|
|
|
|
|
|
Windows ������ Anaconda�� [�ٿ��ε�](https://www.anaconda.com/download/#windows)�ϰ� ��ġ�Ͻʽÿ�. |
|
|
|
Anaconda�� ���������ν�, �ٸ� ���� ������ Python�� �и��� ȯ�濡�� ������ �� �ֽ��ϴ�. |
|
|
|
Python 2�� ���̻� �������� �ʱ� ������ Python 3.5 �Ǵ� 3.6�� �ʿ��մϴ�. �� ���̵忡�� �츮�� |
|
|
|
Python 3.6 ������ Anaconda 5.1 ������ ������ ���Դϴ�. |
|
|
|
([64-bit](https://repo.continuum.io/archive/Anaconda3-5.1.0-Windows-x86_64.exe) |
|
|
|
�Ǵ� [32-bit](https://repo.continuum.io/archive/Anaconda3-5.1.0-Windows-x86.exe) |
|
|
|
��ũ). |
|
|
|
|
|
|
|
<p align="center"> |
|
|
|
<img src="images/anaconda_install.PNG" |
|
|
|
alt="Anaconda Install" |
|
|
|
width="500" border="10" /> |
|
|
|
</p> |
|
|
|
|
|
|
|
����Ʈ _advanced installation options_�� �����ϴ� ���� ��õ������ ��Ȳ�� ���� ������ �ɼ��� �����Ͻʽÿ�. |
|
|
|
|
|
|
|
<p align="center"> |
|
|
|
<img src="images/anaconda_default.PNG" alt="Anaconda Install" width="500" border="10" /> |
|
|
|
</p> |
|
|
|
|
|
|
|
��ġ �Ŀ� �ݵ��� __Anaconda Navigator__ �� ���� ������ �Ϸ��ؾ� �մϴ�. |
|
|
|
Windows Ž�� â����, _anaconda navigator_ �� Ÿ�����Ͽ� Anaconda Navigator �� �� �� �ֽ��ϴ�. |
|
|
|
|
|
|
|
ȯ�� ������ �����Ǿ����� �ʴٸ� `conda` ���ɾ Ÿ�������� �� |
|
|
|
"conda is not recognized as internal or external command" ���� ������ ���� ���Դϴ�. |
|
|
|
�̸� �ذ��ϱ� ���� ��Ȯ�� ȯ�� ���� ������ �ʿ��մϴ�. |
|
|
|
|
|
|
|
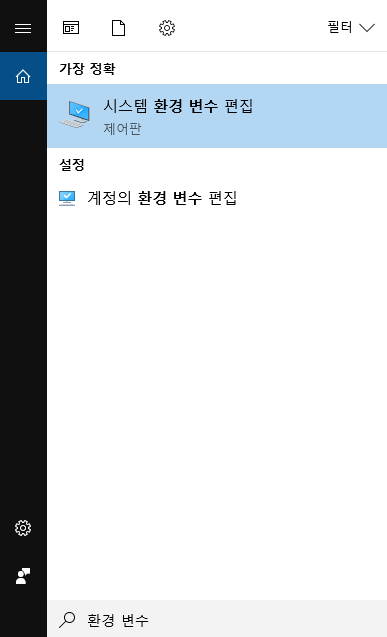
Ž�� â���� `ȯ�� ����`�� Ÿ���� �Ͽ� (������ Ű�� �����ų� ���� �Ʒ� ������ ��ư�� ���� �� �� �ֽ��ϴ�). |
|
|
|
__�ý��� ȯ�� ���� ����__ �ɼ��� �ҷ��ɴϴ�. |
|
|
|
|
|
|
|
<p align="center"> |
|
|
|
<img src="images/edit_env_var_kr.png" |
|
|
|
alt="edit env variables" |
|
|
|
width="250" border="10" /> |
|
|
|
</p> |
|
|
|
|
|
|
|
�� �ɼǿ��� __ȯ�� ����__ ��ư�� Ŭ���ϰ�. �Ʒ� __�ý��� ����__���� "Path" ������ ���� Ŭ���ϰ� __���� ������__�� Ŭ���Ͽ� ���� �� path�� �߰��Ͻʽÿ�. |
|
|
|
|
|
|
|
```console |
|
|
|
%UserProfile%\Anaconda3\Scripts |
|
|
|
%UserProfile%\Anaconda3\Scripts\conda.exe |
|
|
|
%UserProfile%\Anaconda3 |
|
|
|
%UserProfile%\Anaconda3\python.exe |
|
|
|
``` |
|
|
|
|
|
|
|
## �ܰ� 2: ���ο� Conda ȯ�� ���� �� Ȱ��ȭ |
|
|
|
|
|
|
|
ML-Agents toolkit�� �Բ� ������ ���ο� [Conda ȯ��](https://conda.io/docs/)�� ���� ���Դϴ�. |
|
|
|
�� �۾��� ��ġ�� ���� ��Ű���� �� ȯ�濡�� ���ѵȴٴ� ���� �ǹ��մϴ�. �̴� �ٸ� ȯ���̳� �ٸ� ���̽� ��ġ�� |
|
|
|
������ ��ġ�� �ʽ��ϴ�. ML-Agents�� ������ ������ �� Conda ȯ���� Ȱ��ȭ ���Ѿ� �մϴ�. |
|
|
|
|
|
|
|
���ο� Conda ȯ���� ������ ����, ���ο� Anaconda ������Ʈ(Ž�� â���� _Anaconda Prompt_�� Ŭ��)�� ���� ���� |
|
|
|
���ɾ Ÿ���� �Ͻʽÿ�: |
|
|
|
|
|
|
|
```sh |
|
|
|
conda create -n ml-agents python=3.6 |
|
|
|
``` |
|
|
|
|
|
|
|
�� ��Ű���� ��ġ�ϱ� ���� ������ ���� ���� `y`�� Ÿ�����ϰ� ���� �����ʽÿ� _(���ͳ��� �����Ǿ��ִ��� Ȯ���Ͻʽÿ�)_. |
|
|
|
�� �䱸�Ǵ� ��Ű������ �ݵ��� ��ġ�ؾ� �մϴ�. ���ο� Conda ȯ�濡�� Python 3.6 ������ �����Ǹ� ml-agents�� ȣ���˴ϴ�. |
|
|
|
|
|
|
|
<p align="center"> |
|
|
|
<img src="images/conda_new.PNG" alt="Anaconda Install" width="500" border="10" /> |
|
|
|
</p> |
|
|
|
|
|
|
|
�ռ� ���� ȯ���� �̿��ϱ� ���� �ݵ��� Ȱ��ȭ�� �ؾ��մϴ�. _(���Ŀ� ���� ���ɾ� ���� ȯ���� �������� �� �ֽ��ϴ�)_. |
|
|
|
���� Anaconda ������Ʈ���� ���� ���ɾ Ÿ���� �Ͻʽÿ�: |
|
|
|
|
|
|
|
```sh |
|
|
|
activate ml-agents |
|
|
|
``` |
|
|
|
|
|
|
|
Ȱ��ȭ �Ŀ� `(ml-agents)`���� ���ڰ� ������ �� �տ� ��Ÿ���� ���� �� �� �ֽ��ϴ�. |
|
|
|
|
|
|
|
��������, `tensorflow`�� ��ġ�մϴ�. ���̽� ��Ű���� ��ġ�ϱ� ���� �����ϴ� `pip`���� ��Ű�� ���� �ý��۸� �����Ͽ� ��ġ�� �� �ֽ��ϴ�. |
|
|
|
�ֽ� ������ TensorFlow�� �۵����� ���� �� �����Ƿ�, ��ġ ������ 1.7.1���� Ȯ���ؾ� �մϴ�. ���� Anaconda ������Ʈ â���� |
|
|
|
���� ���ɾ Ÿ���� �Ͻʽÿ�._(���ͳ��� �����Ǿ� �ִ��� Ȯ���Ͽ� �ֽʽÿ�)_: |
|
|
|
|
|
|
|
```sh |
|
|
|
pip install tensorflow==1.7.1 |
|
|
|
``` |
|
|
|
|
|
|
|
## �ܰ� 3: �ʼ� ���̽� ��Ű�� ��ġ |
|
|
|
|
|
|
|
ML-Agents toolkit�� ���� ���̽� ��Ű���� �������Դϴ�. `pip`�� �����Ͽ� �� ���̽� ���Ӽ����� ��ġ�Ͻʽÿ�. |
|
|
|
|
|
|
|
ML-Agents Toolkit ������ �����Ұ� ���� ��ǻ�Ϳ� �����Ǿ����� �ʾҴٸ� �����Ͻʽÿ�. Git�� ([�ٿ��ε�](https://git-scm.com/download/win))�ϰ� |
|
|
|
������Ų �� ���� ���ɾ Anaconda ������Ʈâ�� �Է��Ͽ� ������ �� �ֽ��ϴ�. _(���� �� ������Ʈ â�� �����ִٸ� `activate ml-agents`�� Ÿ�����Ͽ� |
|
|
|
ml-agents Conda ȯ���� Ȱ��ȭ �Ǿ��ִ��� Ȯ���Ͻʽÿ�)_: |
|
|
|
|
|
|
|
```sh |
|
|
|
git clone https://github.com/Unity-Technologies/ml-agents.git |
|
|
|
``` |
|
|
|
|
|
|
|
���� Git�� �����ϰ� ���� �ʴٸ� ������ [��ũ](https://github.com/Unity-Technologies/ml-agents/archive/master.zip)���� ���� ������ �ٿ��ε� �� �� �ֽ��ϴ�. |
|
|
|
|
|
|
|
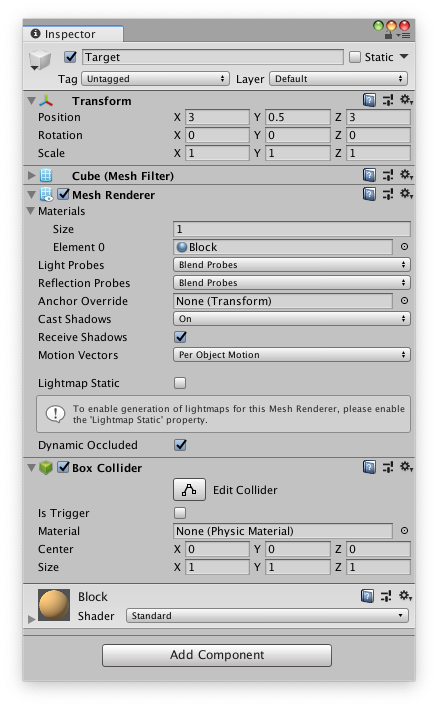
`UnitySDK` ���� �����丮���� ������Ʈ�� �߰��� ����Ƽ �ּ��� ���ԵǾ� �ֽ��ϴ�. ���� �����ϴµ� ������ �Ǵ� ���� [���� ȯ��](Learning-Environment-Examples.md)���� �ֽ��ϴ�. |
|
|
|
|
|
|
|
`ml-agents` ���� �����丮���� ����Ƽ ȯ���� �� �����ϴ� ���� ��ȭ�н� Ʈ���̳� ���̽� ��Ű���� ���ԵǾ� �ֽ��ϴ�. |
|
|
|
|
|
|
|
`ml-agents-envs` ���� �����丮���� `ml-agents` ��Ű���� ���ӵǴ� ����Ƽ�� �������̽��� ���� ���̽� API�� ���ԵǾ� �ֽ��ϴ�. |
|
|
|
|
|
|
|
`gym-unity` ���� �����丮���� OpenAI Gym�� �������̽��� ���� ��Ű���� ���ԵǾ� �ֽ��ϴ�. |
|
|
|
|
|
|
|
`mlagents-learn`�� ������ �� Ʈ���̳��� ȯ�� ���� ������ �� �����丮 �ȿ� �ʿ��ϹǷ�, ������ �ٿ��ε� �� �����丮�� ��ġ�� �����Ͻʽÿ�. |
|
|
|
���ͳ��� �����Ǿ����� Ȯ���ϰ� Anaconda ������Ʈ���� ���� ���ɾ Ÿ���� �Ͻʽÿ�t: |
|
|
|
|
|
|
|
```console |
|
|
|
pip install mlagents |
|
|
|
``` |
|
|
|
|
|
|
|
ML-Agents toolkit�� ������ �� �ʿ��� ���� ���̽� ��Ű���� ��ġ�� �Ϸ��� ���Դϴ�. |
|
|
|
|
|
|
|
Windows���� ���� pip�� �����Ͽ� Ư�� ���̽� ��Ű���� ��ġ�� �� ��Ű���� ij���� �д� ���� ���� ���� �ֽ��ϴ�. |
|
|
|
������ ���� ������ �ذ��� �� �� �ֽ��ϴ�: |
|
|
|
|
|
|
|
```console |
|
|
|
pip install mlagents --no-cache-dir |
|
|
|
``` |
|
|
|
|
|
|
|
`--no-cache-dir`�� pip���� ij���� ��Ȱ��ȭ �Ѵٴ� ���Դϴ�. |
|
|
|
|
|
|
|
|
|
|
|
### ������ ���� ��ġ |
|
|
|
|
|
|
|
���� `ml-agents` �Ǵ� `ml-agents-envs`�� �����ϰ� �ʹٸ�, PyPi�� �ƴ� ������ �����ҷ� ���� ��Ű���� ��ġ�ؾ� �մϴ�. |
|
|
|
�̸� ����, `ml-agents` �� `ml-agents-envs` �� ���� ��ġ�ؾ� �մϴ�. |
|
|
|
|
|
|
|
�������� ������ `C:\Downloads`�� ��ġ�� �ֽ��ϴ�. ������ �����ϰų� �ٿ��ε��� �� |
|
|
|
Anaconda ������Ʈ���� ml-agents �����丮 ���� ml-agents ���� �����丮�� �����Ͻʽÿ�: |
|
|
|
|
|
|
|
```console |
|
|
|
cd C:\Downloads\ml-agents |
|
|
|
``` |
|
|
|
|
|
|
|
�������� ���� �����丮���� ������ �����Ͻʽÿ�: |
|
|
|
|
|
|
|
```console |
|
|
|
cd ml-agents-envs |
|
|
|
pip install -e . |
|
|
|
cd .. |
|
|
|
cd ml-agents |
|
|
|
pip install -e . |
|
|
|
``` |
|
|
|
|
|
|
|
`-e` �÷��� �����Ͽ� pip�� ���� �ϸ� ���̽� ������ ���� ������ �� �ְ� `mlagents-learn`�� ������ �� �ݿ��˴ϴ�. |
|
|
|
`mlagents` ��Ű���� `mlagents_envs`�� �������̰�, �ٸ� ������ ��ġ�ϸ� PyPi�� ���� `mlagents_envs` �� ��ġ�� �� �ֱ� ������ |
|
|
|
�� �������� ��Ű���� ��ġ�ϴ� ���� �߿��մϴ�. |
|
|
|
|
|
|
|
## (�ɼ�) Step 4: ML-Agents Toolkit�� ������ GPU �н� |
|
|
|
|
|
|
|
ML-Agents toolkit�� ���� GPU�� �ʿ����� ������ �н� �߿� PPO �˰����� �ӵ��� ũ�� ������ ���մϴ�(������ ���Ŀ� GPU�� ������ �� �� �ֽ��ϴ�). |
|
|
|
�� ���̵��� GPU�� ������ �н��� �ϰ� ���� ���� �����ڸ� ���� ���̵� �Դϴ�. ���� GPU�� CUDA�� ȣȯ�Ǵ��� Ȯ���ؾ� �մϴ�. |
|
|
|
[����](https://developer.nvidia.com/cuda-gpus) Nvidia ���������� Ȯ���� �ֽʽÿ�. |
|
|
|
|
|
|
|
���� ML-Agents toolkit �� CUDA 9.0 ������ cuDNN 7.0.5 ������ �����˴ϴ�. |
|
|
|
|
|
|
|
### Nvidia CUDA toolkit ��ġ |
|
|
|
|
|
|
|
Nvidia ��ī�̺꿡�� CUDA ��Ŷ(toolkit) 9.0�� [�ٿ��ε�](https://developer.nvidia.com/cuda-toolkit-archive)�ϰ� ��ġ�Ͻʽÿ�. |
|
|
|
ML-Agents toolkit�� ������Ű�� ���� CUDA ��Ŷ�� GPU ���� ���̺귯��, |
|
|
|
������-����ȭ ����, C/C++(���־� ��Ʃ���� 2017) �����Ϸ�, ��Ÿ�� ���̺귯���� �����մϴ�. |
|
|
|
�� ���̵忡���� [9.0.176](https://developer.nvidia.com/compute/cuda/9.0/Prod/network_installers/cuda_9.0.176_win10_network-exe))������ �����մϴ�. |
|
|
|
|
|
|
|
��ġ�ϱ� ��, __���� ���� ����Ƽ �Ǵ� ���־� ��Ʃ������ �����ߴ���__ Ȯ���Ͽ� �ֽʽÿ�. |
|
|
|
|
|
|
|
�ν��緯�� �����ϰ� Express �ɼ��� �����Ͻʽÿ�. CUDA ��Ŷ�� ��ġ�� �����丮�� ������ �ֽʽÿ�. �� ���̵忡����, |
|
|
|
`C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v9.0` ���ο� ��ġ�մϴ�. |
|
|
|
|
|
|
|
### Nvidia cuDNN ���̺귯�� ��ġ |
|
|
|
|
|
|
|
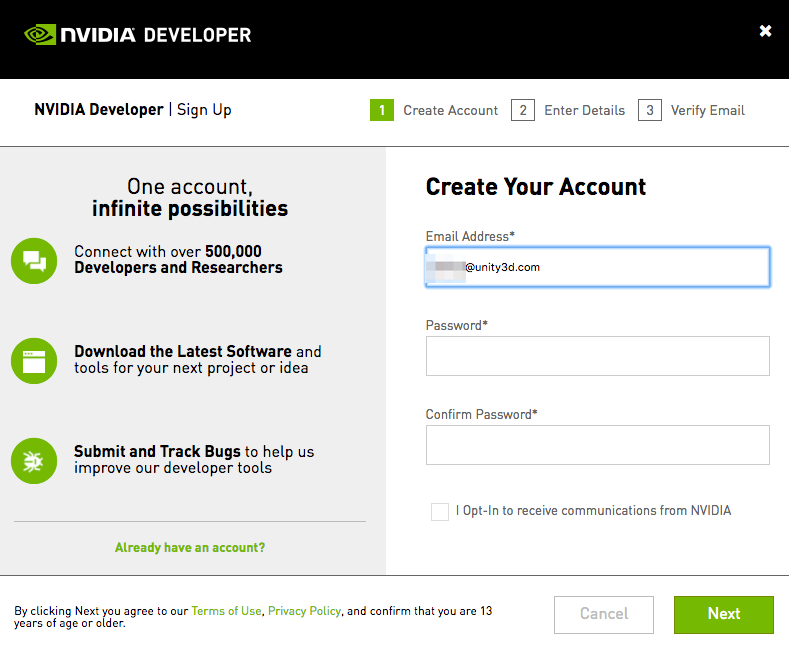
Nvidia���� cuDNN ���̺귯���� [�ٿ��ε�](https://developer.nvidia.com/cudnn)�ϰ� ��ġ�Ͻʽÿ�. |
|
|
|
cuDNN�� ���� �Ű����� ���� �⺻�� �Ǵ� GPU ���� ���̺귯��. �ٿ��ε� ���� Nvidia Developer Program�� �����ؾ��� ���Դϴ�(����). |
|
|
|
|
|
|
|
<p align="center"> |
|
|
|
<img src="images/cuDNN_membership_required.png" |
|
|
|
alt="cuDNN membership required" |
|
|
|
width="500" border="10" /> |
|
|
|
</p> |
|
|
|
|
|
|
|
�����ϰ� cuDNN [�ٿ��ε� ������](https://developer.nvidia.com/cudnn)�� ���ư��ʽÿ�. |
|
|
|
ª�� �������翡 �����ؾ� �� ���� �ֽ��ϴ�. When you get to the list |
|
|
|
cuDNN ������ ����Ʈ���� __�ܰ� 1���� ��ġ�� CUDA ��Ŷ�� �´� ������ �ٿ��ε��ϰ� �ִ��� Ȯ���Ͻʽÿ�.__ �� ���̵忡����, |
|
|
|
CUDA ��Ŷ 9.0 ������ ���� 7.0.5 ������ �����մϴ� |
|
|
|
([�ٿ��ε� ��ũ](https://developer.nvidia.com/compute/machine-learning/cudnn/secure/v7.0.5/prod/9.0_20171129/cudnn-9.0-windows10-x64-v7)). |
|
|
|
|
|
|
|
cuDNN ������ �ٿ��ε� �� �Ŀ�, CUDA ��Ŷ �����丮�ȿ� ������ ����(���� ����)�ؾ� �մϴ�. |
|
|
|
cuDNN zip ���� �ȿ��� ������ ���� `bin`, `include`, ���� `lib`�� �ֽ��ϴ�. |
|
|
|
|
|
|
|
<p align="center"> |
|
|
|
<img src="images/cudnn_zip_files.PNG" |
|
|
|
alt="cuDNN zip files" |
|
|
|
width="500" border="10" /> |
|
|
|
</p> |
|
|
|
|
|
|
|
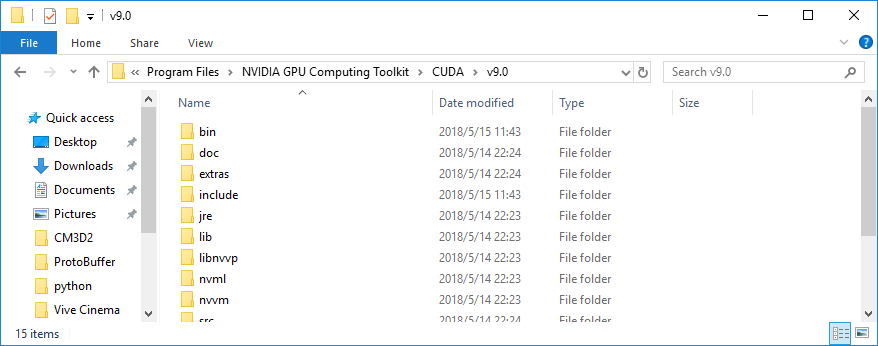
�� ������ ������ CUDA ��Ŷ �����丮�ȿ� �����Ͻʽÿ�. |
|
|
|
CUDA ��Ŷ �����丮�� `C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v9.0`�� ��ġ�� �ֽ��ϴ�. |
|
|
|
|
|
|
|
<p align="center"> |
|
|
|
<img src="images/cuda_toolkit_directory.PNG" |
|
|
|
alt="cuda toolkit directory" |
|
|
|
width="500" border="10" /> |
|
|
|
</p> |
|
|
|
|
|
|
|
### ȯ�� ���� ���� |
|
|
|
|
|
|
|
1���� ȯ�� ������ 2���� ���� ������ �߰��ؾ� �մϴ�. |
|
|
|
|
|
|
|
ȯ�� ������ �����ϱ� ����, Ž�� â���� `ȯ�� ����`�� Ÿ���� �Ͽ� (������ Ű�� �����ų� ���� �Ʒ� ������ ��ư�� ���� �� �� �ֽ��ϴ�). |
|
|
|
__�ý��� ȯ�� ���� ����__ �ɼ��� �ҷ��ɴϴ�. |
|
|
|
|
|
|
|
<p align="center"> |
|
|
|
<img src="images/edit_env_var_kr.png" |
|
|
|
alt="edit env variables" |
|
|
|
width="250" border="10" /> |
|
|
|
</p> |
|
|
|
|
|
|
|
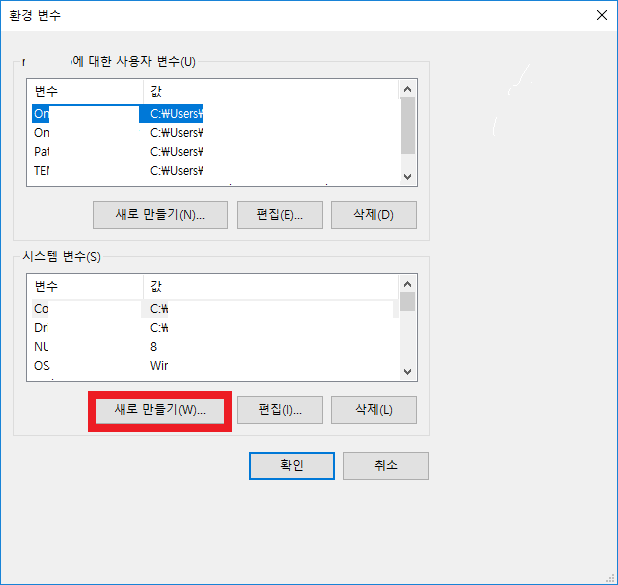
�� �ɼǿ��� __ȯ�� ����__ ��ư�� Ŭ���ϰ� �ý��� ������ __���� ������__�� Ŭ���Ͻʽÿ� _(������ ������ �ƴ� �Ʒ��� __�ý��� ����__���� Ȯ���Ͻʽÿ�). |
|
|
|
|
|
|
|
<p align="center"> |
|
|
|
<img src="images/new_system_variable_kr.PNG" |
|
|
|
alt="new system variable" |
|
|
|
width="500" border="10" /> |
|
|
|
</p> |
|
|
|
|
|
|
|
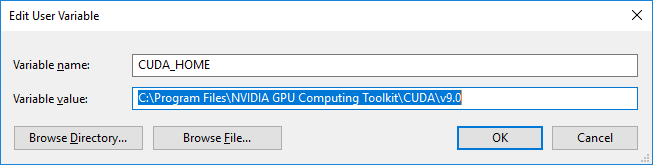
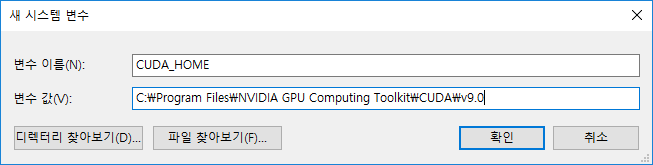
__���� �̸�__�� `CUDA_HOME`���� �����ϰ� ���� ������ CUDA ��Ŷ �����丮 ���θ� �Է��� �ֽʽÿ�. |
|
|
|
�� ���̵忡�� �����丮 ���δ� `C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v9.0` �Դϴ�. Ȯ�� ��ư�� �����ֽʽÿ�. |
|
|
|
|
|
|
|
<p align="center"> |
|
|
|
<img src="images/system_variable_name_value_kr.PNG" |
|
|
|
alt="system variable names and values" |
|
|
|
width="500" border="10" /> |
|
|
|
</p> |
|
|
|
|
|
|
|
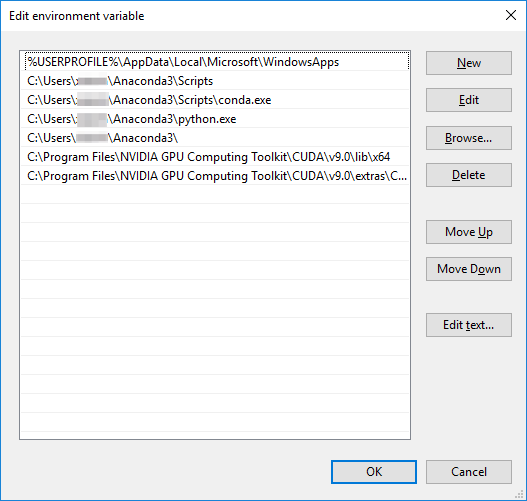
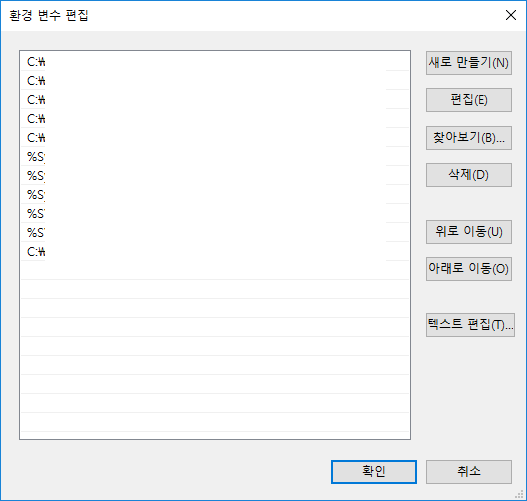
2���� ���� ���� ������ ���� __ȯ�� ����__ â ���� �Ʒ� �ι�° �ڽ��� __�ý��� ����__�ȿ���, |
|
|
|
`Path` ������ ã�� Ŭ���ϰ� __����__��ư�� �����ʽÿ�. ����Ʈ�� 2���� �����丮�� �߰��� ���Դϴ�. �� �����丮�� ������ �����ϴ�: |
|
|
|
|
|
|
|
```console |
|
|
|
C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v9.0\lib\x64 |
|
|
|
C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v9.0\extras\CUPTI\libx64 |
|
|
|
``` |
|
|
|
|
|
|
|
���� �����丮 ��ġ�� ��ġ�� �����丮 �������� Ȯ���Ͻʽÿ�. _���ҹ��ڿ� �����Ͻʽÿ�_. |
|
|
|
|
|
|
|
<p align="center"> |
|
|
|
<img src="images/path_variables_kr.PNG" |
|
|
|
alt="Path variables" |
|
|
|
width="500" border="10" /> |
|
|
|
</p> |
|
|
|
|
|
|
|
### TensorFlow GPU ��ġ |
|
|
|
|
|
|
|
����, `pip`�� �����Ͽ� 1.7.1. ���� `tensorflow-gpu`�� ��ġ�Ͻʽÿ� . ml-agents Conda ȯ���� Ȱ��ȭ ��Ų Anaconda ������Ʈ���� |
|
|
|
CPU�� TensorFlow �����ϰ� GPU�� TensorFlow�� ��ġ�ϱ� ���� ���� ���ɾ Ÿ���� �Ͻʽÿ� _(���ͳ��� �����Ǿ� �ִ��� Ȯ���Ͻʽÿ�)_: |
|
|
|
|
|
|
|
```sh |
|
|
|
pip uninstall tensorflow |
|
|
|
pip install tensorflow-gpu==1.7.1 |
|
|
|
``` |
|
|
|
|
|
|
|
����������, ���� ���� ������ ��ġ�Ǿ� �ְ�, Tensorflow���� GPU�� �ν��ϰ� �ִ��� ��Ʈ�ؾ��մϴ�. |
|
|
|
���� Anaconda ������Ʈ���� Python�� ȣ���Ͽ� ���ϴ�: |
|
|
|
|
|
|
|
```sh |
|
|
|
python |
|
|
|
``` |
|
|
|
|
|
|
|
���� ���� ���ɾ Ÿ���� �Ͻʽÿ�: |
|
|
|
|
|
|
|
```python |
|
|
|
import tensorflow as tf |
|
|
|
|
|
|
|
sess = tf.Session(config=tf.ConfigProto(log_device_placement=True)) |
|
|
|
``` |
|
|
|
|
|
|
|
������ ������ ������ �� �� ���� ���Դϴ�: |
|
|
|
|
|
|
|
```console |
|
|
|
Found device 0 with properties ... |
|
|
|
``` |
|
|
|
|
|
|
|
## Acknowledgments |
|
|
|
|
|
|
|
�� ���̵带 ������ ���� ������ �ʾ��� �ۼ��� |
|
|
|
[Jason Weimann](https://unity3d.college/2017/10/25/machine-learning-in-unity3d-setting-up-the-environment-tensorflow-for-agentml-on-windows-10/) |
|
|
|
�� |
|
|
|
[Nitish S. Mutha](http://blog.nitishmutha.com/tensorflow/2017/01/22/TensorFlow-with-gpu-for-windows.html) |
|
|
|
���� �����帳�ϴ�. |
|
|
|
|
|
|
|
## �ѱ� ���� |
|
|
|
|
|
|
|
�ش� ������ �ѱ� ������ [������ (Hyeonjun Jang)]([https://github.com/janghyeonjun](https://github.com/janghyeonjun))�� ���� �����Ǿ����ϴ�. ������ ������ ��Ż�ڰ� �ִ� ���� totok682@naver.com ���� �����ֽø� �����帮�ڽ��ϴ�. |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

{kind=link}
{kind=link}

{kind=link}
{kind=link}
{kind=link}
{kind=link}

{kind=link}
{kind=link}
{kind=link}
{kind=link}

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

{kind=link}

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

{kind=link}

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}