当前提交
d68a833f
共有 51 个文件被更改,包括 4087 次插入 和 281 次删除
-
10.yamato/environments.yml
-
6.yamato/upm-ci-performance.yml
-
22README.md
-
4com.unity.perception/CHANGELOG.md
-
8com.unity.perception/Documentation~/DatasetCapture.md
-
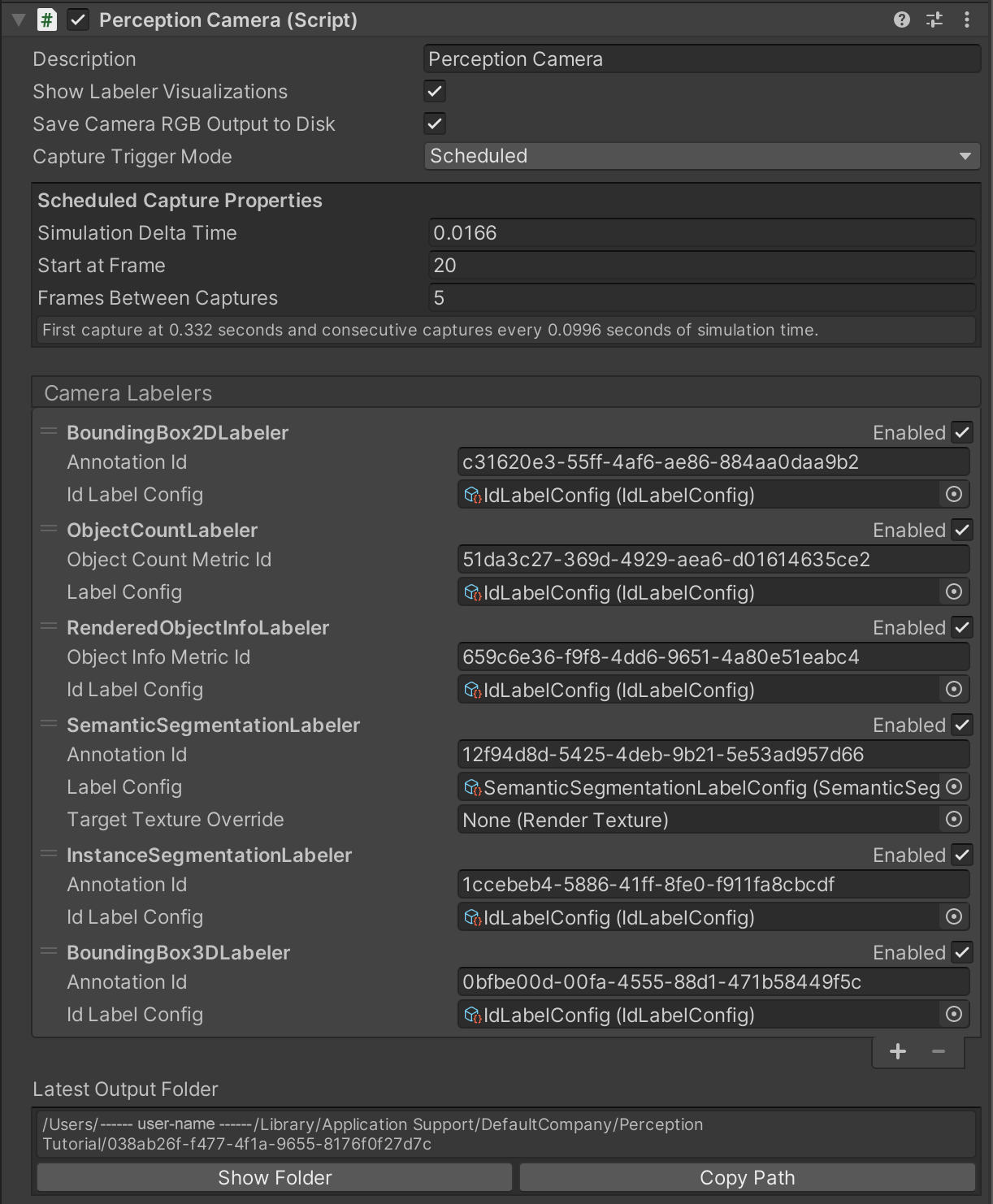
118com.unity.perception/Documentation~/PerceptionCamera.md
-
50com.unity.perception/Documentation~/Randomization/Index.md
-
16com.unity.perception/Documentation~/Randomization/Parameters.md
-
6com.unity.perception/Documentation~/Randomization/RandomizerTags.md
-
20com.unity.perception/Documentation~/Randomization/Randomizers.md
-
8com.unity.perception/Documentation~/Randomization/Samplers.md
-
34com.unity.perception/Documentation~/Randomization/Scenarios.md
-
146com.unity.perception/Documentation~/Schema/Synthetic_Dataset_Schema.md
-
14com.unity.perception/Documentation~/Tutorial/Phase1.md
-
6com.unity.perception/Documentation~/Tutorial/Phase2.md
-
14com.unity.perception/Documentation~/Tutorial/Phase3.md
-
6com.unity.perception/Documentation~/Tutorial/TUTORIAL.md
-
882com.unity.perception/Documentation~/images/PerceptionCameraFinished.png
-
22com.unity.perception/Editor/Randomization/Editors/RunInUnitySimulationWindow.cs
-
6com.unity.perception/Runtime/Randomization/Parameters/CategoricalParameter.cs
-
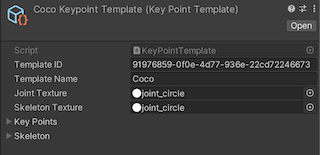
122com.unity.perception/Documentation~/images/keypoint_template_header.png
-
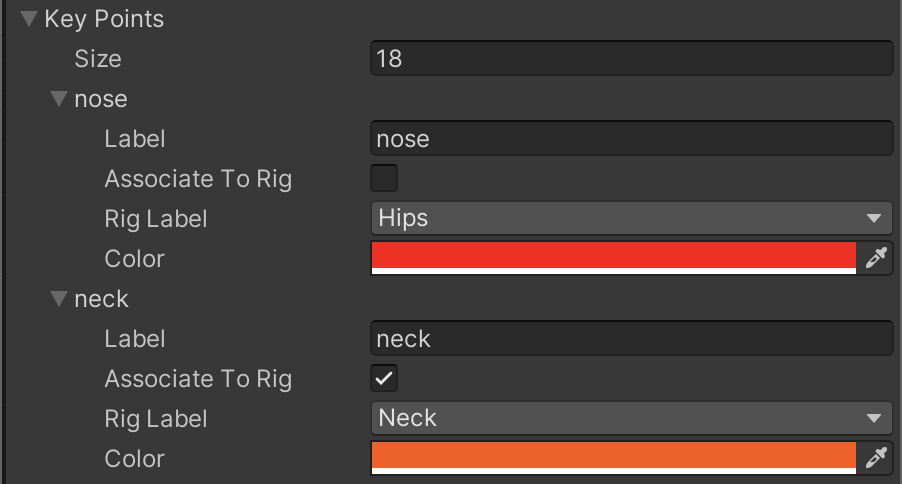
194com.unity.perception/Documentation~/images/keypoint_template_keypoints.png
-
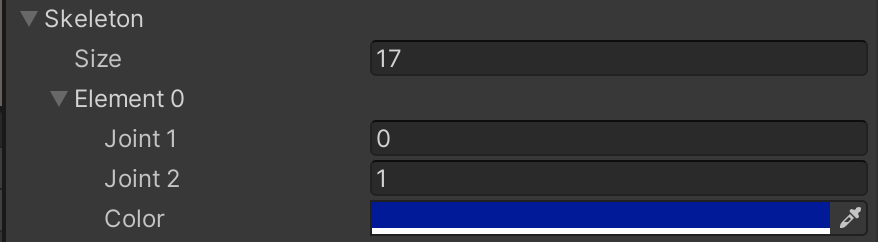
99com.unity.perception/Documentation~/images/keypoint_template_skeleton.png
-
32com.unity.perception/Editor/Randomization/Editors/RandomizerTagEditor.cs
-
3com.unity.perception/Editor/Randomization/Editors/RandomizerTagEditor.cs.meta
-
61com.unity.perception/Runtime/GroundTruth/Labelers/AnimationPoseLabel.cs
-
3com.unity.perception/Runtime/GroundTruth/Labelers/AnimationPoseLabel.cs.meta
-
142com.unity.perception/Runtime/GroundTruth/Labelers/CocoKeypointTemplate.asset
-
8com.unity.perception/Runtime/GroundTruth/Labelers/CocoKeypointTemplate.asset.meta
-
34com.unity.perception/Runtime/GroundTruth/Labelers/JointLabel.cs
-
3com.unity.perception/Runtime/GroundTruth/Labelers/JointLabel.cs.meta
-
437com.unity.perception/Runtime/GroundTruth/Labelers/KeyPointLabeler.cs
-
3com.unity.perception/Runtime/GroundTruth/Labelers/KeyPointLabeler.cs.meta
-
80com.unity.perception/Runtime/GroundTruth/Labelers/KeyPointTemplate.cs
-
3com.unity.perception/Runtime/GroundTruth/Labelers/KeyPointTemplate.cs.meta
-
109com.unity.perception/Runtime/GroundTruth/Labelers/Visualization/VisualizationHelper.cs
-
3com.unity.perception/Runtime/GroundTruth/Labelers/Visualization/VisualizationHelper.cs.meta
-
72com.unity.perception/Runtime/GroundTruth/Resources/AnimationRandomizerController.controller
-
8com.unity.perception/Runtime/GroundTruth/Resources/AnimationRandomizerController.controller.meta
-
1001com.unity.perception/Runtime/GroundTruth/Resources/PlayerIdle.anim
-
8com.unity.perception/Runtime/GroundTruth/Resources/PlayerIdle.anim.meta
-
6com.unity.perception/Runtime/GroundTruth/Resources/joint_circle.png
-
108com.unity.perception/Runtime/GroundTruth/Resources/joint_circle.png.meta
-
10com.unity.perception/Runtime/Randomization/Parameters/ParameterTypes/CategorialParameters/AnimationClipParameter.cs
-
3com.unity.perception/Runtime/Randomization/Parameters/ParameterTypes/CategorialParameters/AnimationClipParameter.cs.meta
-
46com.unity.perception/Runtime/Randomization/Randomizers/RandomizerExamples/Randomizers/AnimationRandomizer.cs
-
3com.unity.perception/Runtime/Randomization/Randomizers/RandomizerExamples/Randomizers/AnimationRandomizer.cs.meta
-
48com.unity.perception/Runtime/Randomization/Randomizers/RandomizerExamples/Tags/AnimationRandomizerTag.cs
-
3com.unity.perception/Runtime/Randomization/Randomizers/RandomizerExamples/Tags/AnimationRandomizerTag.cs.meta
-
307com.unity.perception/Tests/Runtime/GroundTruthTests/KeyPointGroundTruthTests.cs
-
11com.unity.perception/Tests/Runtime/GroundTruthTests/KeyPointGroundTruthTests.cs.meta
{kind=link}
| 之前 | 之后 |
|---|---|
|
|
|
| 宽度: 1222 | 高度: 1482 | 大小: 224 KiB |
{kind=link}
| 之前 | 之后 |
|---|---|
|
|
| 宽度: 320 | 高度: 155 | 大小: 30 KiB |
{kind=link}
| 之前 | 之后 |
|---|---|
|
|
| 宽度: 902 | 高度: 484 | 大小: 50 KiB |
{kind=link}
| 之前 | 之后 |
|---|---|
|
|
| 宽度: 878 | 高度: 242 | 大小: 22 KiB |
|
|||
using UnityEditor; |
|||
using UnityEditor.UIElements; |
|||
using UnityEngine.Experimental.Perception.Randomization.Randomizers; |
|||
using UnityEngine.UIElements; |
|||
|
|||
namespace UnityEngine.Experimental.Perception.Randomization.Editor |
|||
{ |
|||
[CustomEditor(typeof(RandomizerTag), true)] |
|||
public class RandomizerTagEditor : UnityEditor.Editor |
|||
{ |
|||
public override VisualElement CreateInspectorGUI() |
|||
{ |
|||
var rootElement = new VisualElement(); |
|||
CreatePropertyFields(rootElement); |
|||
return rootElement; |
|||
} |
|||
|
|||
void CreatePropertyFields(VisualElement rootElement) |
|||
{ |
|||
var iterator = serializedObject.GetIterator(); |
|||
iterator.NextVisible(true); |
|||
do |
|||
{ |
|||
if (iterator.name == "m_Script") |
|||
continue; |
|||
var propertyField = new PropertyField(iterator.Copy()); |
|||
propertyField.Bind(serializedObject); |
|||
rootElement.Add(propertyField); |
|||
} while (iterator.NextVisible(false)); |
|||
} |
|||
} |
|||
} |
|||
|
|||
fileFormatVersion: 2 |
|||
guid: 364d57cb71da4535b77257c294c850f7 |
|||
timeCreated: 1611697363 |
|||
|
|||
using System; |
|||
using System.Collections.Generic; |
|||
using System.Linq; |
|||
|
|||
namespace UnityEngine.Perception.GroundTruth |
|||
{ |
|||
/// <summary>
|
|||
/// Record that maps a pose to a timestamp
|
|||
/// </summary>
|
|||
[Serializable] |
|||
public class PoseTimestampRecord |
|||
{ |
|||
/// <summary>
|
|||
/// The percentage within the clip that the pose starts, a value from 0 (beginning) to 1 (end)
|
|||
/// </summary>
|
|||
[Tooltip("The percentage within the clip that the pose starts, a value from 0 (beginning) to 1 (end)")] |
|||
public float startOffsetPercent; |
|||
/// <summary>
|
|||
/// The label to use for any captures inside of this time period
|
|||
/// </summary>
|
|||
public string poseLabel; |
|||
} |
|||
|
|||
/// <summary>
|
|||
/// The animation pose label is a mapping that file that maps a time range in an animation clip to a ground truth
|
|||
/// pose. The timestamp record is defined by a pose label and a duration. The timestamp records are order dependent
|
|||
/// and build on the previous entries. This means that if the first record has a duration of 5, then it will be the label
|
|||
/// for all points in the clip from 0 (the beginning) to the five second mark. The next record will then go from the end
|
|||
/// of the previous clip to its duration. If there is time left over in the flip, the final entry will be used.
|
|||
/// </summary>
|
|||
[CreateAssetMenu(fileName = "AnimationPoseTimestamp", menuName = "Perception/Animation Pose Timestamps")] |
|||
public class AnimationPoseLabel : ScriptableObject |
|||
{ |
|||
/// <summary>
|
|||
/// The animation clip used for all of the timestamps
|
|||
/// </summary>
|
|||
public AnimationClip animationClip; |
|||
/// <summary>
|
|||
/// The list of timestamps, order dependent
|
|||
/// </summary>
|
|||
public List<PoseTimestampRecord> timestamps; |
|||
|
|||
/// <summary>
|
|||
/// Retrieves the pose for the clip at the current time.
|
|||
/// </summary>
|
|||
/// <param name="time">The time in question</param>
|
|||
/// <returns>The pose for the passed in time</returns>
|
|||
public string GetPoseAtTime(float time) |
|||
{ |
|||
if (time < 0 || time > 1) return "unset"; |
|||
|
|||
var i = 1; |
|||
for (i = 1; i < timestamps.Count; i++) |
|||
{ |
|||
if (timestamps[i].startOffsetPercent > time) break; |
|||
} |
|||
|
|||
return timestamps[i - 1].poseLabel; |
|||
} |
|||
} |
|||
} |
|||
|
|||
fileFormatVersion: 2 |
|||
guid: 4c69656f5dd14516a3a18e42b3b43a4e |
|||
timeCreated: 1611270313 |
|||
|
|||
%YAML 1.1 |
|||
%TAG !u! tag:unity3d.com,2011: |
|||
--- !u!114 &11400000 |
|||
MonoBehaviour: |
|||
m_ObjectHideFlags: 0 |
|||
m_CorrespondingSourceObject: {fileID: 0} |
|||
m_PrefabInstance: {fileID: 0} |
|||
m_PrefabAsset: {fileID: 0} |
|||
m_GameObject: {fileID: 0} |
|||
m_Enabled: 1 |
|||
m_EditorHideFlags: 0 |
|||
m_Script: {fileID: 11500000, guid: 37a7d6f1a40c45a2981a6291f0d03337, type: 3} |
|||
m_Name: CocoKeypointTemplate |
|||
m_EditorClassIdentifier: |
|||
templateName: Coco |
|||
jointTexture: {fileID: 2800000, guid: e381cbaaf29614168bafc8f7ec5dbfe9, type: 3} |
|||
skeletonTexture: {fileID: 2800000, guid: e381cbaaf29614168bafc8f7ec5dbfe9, type: 3} |
|||
keyPoints: |
|||
- label: nose |
|||
associateToRig: 0 |
|||
rigLabel: 0 |
|||
color: {r: 1, g: 0, b: 0, a: 1} |
|||
- label: neck |
|||
associateToRig: 1 |
|||
rigLabel: 9 |
|||
color: {r: 1, g: 0.3397382, b: 0, a: 1} |
|||
- label: right_shoulder |
|||
associateToRig: 1 |
|||
rigLabel: 14 |
|||
color: {r: 1, g: 0.5694697, b: 0, a: 1} |
|||
- label: right_elbow |
|||
associateToRig: 1 |
|||
rigLabel: 16 |
|||
color: {r: 1, g: 0.8258381, b: 0, a: 1} |
|||
- label: right_wrist |
|||
associateToRig: 1 |
|||
rigLabel: 18 |
|||
color: {r: 0.6454141, g: 1, b: 0, a: 1} |
|||
- label: left_shoulder |
|||
associateToRig: 1 |
|||
rigLabel: 13 |
|||
color: {r: 0.33125544, g: 1, b: 0, a: 1} |
|||
- label: left_elbow |
|||
associateToRig: 1 |
|||
rigLabel: 15 |
|||
color: {r: 0.04907012, g: 1, b: 0, a: 1} |
|||
- label: left_wrist |
|||
associateToRig: 1 |
|||
rigLabel: 17 |
|||
color: {r: 0, g: 1, b: 0.16702724, a: 1} |
|||
- label: right_hip |
|||
associateToRig: 1 |
|||
rigLabel: 2 |
|||
color: {r: 0, g: 1, b: 0.36656523, a: 1} |
|||
- label: right_knee |
|||
associateToRig: 1 |
|||
rigLabel: 4 |
|||
color: {r: 0, g: 1, b: 0.58708096, a: 1} |
|||
- label: right_ankle |
|||
associateToRig: 1 |
|||
rigLabel: 6 |
|||
color: {r: 0, g: 1, b: 0.7695224, a: 1} |
|||
- label: left_hip |
|||
associateToRig: 1 |
|||
rigLabel: 1 |
|||
color: {r: 0, g: 1, b: 1, a: 1} |
|||
- label: left_knee |
|||
associateToRig: 1 |
|||
rigLabel: 3 |
|||
color: {r: 0, g: 0.63836884, b: 1, a: 1} |
|||
- label: left_ankle |
|||
associateToRig: 1 |
|||
rigLabel: 5 |
|||
color: {r: 0, g: 0.29786587, b: 1, a: 1} |
|||
- label: right_eye |
|||
associateToRig: 1 |
|||
rigLabel: 22 |
|||
color: {r: 0.45002556, g: 0, b: 1, a: 1} |
|||
- label: left_eye |
|||
associateToRig: 1 |
|||
rigLabel: 21 |
|||
color: {r: 0.9471822, g: 0, b: 1, a: 1} |
|||
- label: right_ear |
|||
associateToRig: 0 |
|||
rigLabel: 22 |
|||
color: {r: 1, g: 0, b: 0.6039734, a: 1} |
|||
- label: left_ear |
|||
associateToRig: 0 |
|||
rigLabel: 21 |
|||
color: {r: 1, g: 0, b: 0.11927748, a: 1} |
|||
skeleton: |
|||
- joint1: 0 |
|||
joint2: 1 |
|||
color: {r: 0.014684939, g: 0.05894964, b: 0.6226415, a: 1} |
|||
- joint1: 1 |
|||
joint2: 2 |
|||
color: {r: 0.5283019, g: 0, b: 0.074745394, a: 1} |
|||
- joint1: 2 |
|||
joint2: 3 |
|||
color: {r: 0.7830189, g: 0.32108742, b: 0.07756319, a: 1} |
|||
- joint1: 3 |
|||
joint2: 4 |
|||
color: {r: 0.9622642, g: 0.85543716, b: 0, a: 1} |
|||
- joint1: 1 |
|||
joint2: 5 |
|||
color: {r: 0.7019608, g: 0.20392157, b: 0.11461401, a: 1} |
|||
- joint1: 5 |
|||
joint2: 6 |
|||
color: {r: 0.3374826, g: 0.9056604, b: 0.26059094, a: 1} |
|||
- joint1: 6 |
|||
joint2: 7 |
|||
color: {r: 0.04214221, g: 0.4811321, b: 0.03404236, a: 1} |
|||
- joint1: 1 |
|||
joint2: 8 |
|||
color: {r: 0, g: 0.764151, b: 0.22962166, a: 1} |
|||
- joint1: 8 |
|||
joint2: 9 |
|||
color: {r: 0, g: 1, b: 0.3301921, a: 1} |
|||
- joint1: 9 |
|||
joint2: 10 |
|||
color: {r: 0, g: 0.9433962, b: 0.71313965, a: 1} |
|||
- joint1: 1 |
|||
joint2: 11 |
|||
color: {r: 0, g: 1, b: 1, a: 1} |
|||
- joint1: 11 |
|||
joint2: 12 |
|||
color: {r: 0, g: 0.38122815, b: 0.9433962, a: 1} |
|||
- joint1: 12 |
|||
joint2: 13 |
|||
color: {r: 0.20773989, g: 0, b: 0.7169812, a: 1} |
|||
- joint1: 0 |
|||
joint2: 14 |
|||
color: {r: 1, g: 0, b: 0.88550186, a: 1} |
|||
- joint1: 0 |
|||
joint2: 15 |
|||
color: {r: 1, g: 0, b: 0.81438303, a: 1} |
|||
- joint1: 16 |
|||
joint2: 14 |
|||
color: {r: 0.5743165, g: 0, b: 1, a: 1} |
|||
- joint1: 17 |
|||
joint2: 15 |
|||
color: {r: 0.8962264, g: 0, b: 0.12766689, a: 1} |
|||
|
|||
fileFormatVersion: 2 |
|||
guid: a29b79d8ce98945a0855b1addec08d86 |
|||
NativeFormatImporter: |
|||
externalObjects: {} |
|||
mainObjectFileID: 11400000 |
|||
userData: |
|||
assetBundleName: |
|||
assetBundleVariant: |
|||
|
|||
using System; |
|||
using System.Collections.Generic; |
|||
using UnityEngine; |
|||
|
|||
namespace UnityEngine.Perception.GroundTruth |
|||
{ |
|||
/// <summary>
|
|||
/// Label to designate a custom joint/keypoint. These are needed to add body
|
|||
/// parts to a humanoid model that are not contained in its <see cref="Animator"/> <see cref="Avatar"/>
|
|||
/// </summary>
|
|||
public class JointLabel : MonoBehaviour |
|||
{ |
|||
/// <summary>
|
|||
/// Maps this joint to a joint in a <see cref="KeyPointTemplate"/>
|
|||
/// </summary>
|
|||
[Serializable] |
|||
public class TemplateData |
|||
{ |
|||
/// <summary>
|
|||
/// The <see cref="KeyPointTemplate"/> that defines this joint.
|
|||
/// </summary>
|
|||
public KeyPointTemplate template; |
|||
/// <summary>
|
|||
/// The name of the joint.
|
|||
/// </summary>
|
|||
public string label; |
|||
}; |
|||
|
|||
/// <summary>
|
|||
/// List of all of the templates that this joint can be mapped to.
|
|||
/// </summary>
|
|||
public List<TemplateData> templateInformation; |
|||
} |
|||
} |
|||
|
|||
fileFormatVersion: 2 |
|||
guid: 8cf4fa374b134b1680755f8280ae8e7d |
|||
timeCreated: 1610577744 |
|||
|
|||
using System; |
|||
using System.Collections.Generic; |
|||
using System.Linq; |
|||
using Unity.Collections; |
|||
using Unity.Entities; |
|||
|
|||
namespace UnityEngine.Perception.GroundTruth |
|||
{ |
|||
/// <summary>
|
|||
/// Produces keypoint annotations for a humanoid model. This labeler supports generic
|
|||
/// <see cref="KeyPointTemplate"/>. Template values are mapped to rigged
|
|||
/// <see cref="Animator"/> <seealso cref="Avatar"/>. Custom joints can be
|
|||
/// created by applying <see cref="JointLabel"/> to empty game objects at a body
|
|||
/// part's location.
|
|||
/// </summary>
|
|||
[Serializable] |
|||
public sealed class KeyPointLabeler : CameraLabeler |
|||
{ |
|||
/// <summary>
|
|||
/// The active keypoint template. Required to annotate keypoint data.
|
|||
/// </summary>
|
|||
public KeyPointTemplate activeTemplate; |
|||
|
|||
/// <inheritdoc/>
|
|||
public override string description |
|||
{ |
|||
get => "Produces keypoint annotations for all visible labeled objects that have a humanoid animation avatar component."; |
|||
protected set { } |
|||
} |
|||
|
|||
///<inheritdoc/>
|
|||
protected override bool supportsVisualization => true; |
|||
|
|||
// ReSharper disable MemberCanBePrivate.Global
|
|||
/// <summary>
|
|||
/// The GUID id to associate with the annotations produced by this labeler.
|
|||
/// </summary>
|
|||
public string annotationId = "8b3ef246-daa7-4dd5-a0e8-a943f6e7f8c2"; |
|||
/// <summary>
|
|||
/// The <see cref="IdLabelConfig"/> which associates objects with labels.
|
|||
/// </summary>
|
|||
public IdLabelConfig idLabelConfig; |
|||
// ReSharper restore MemberCanBePrivate.Global
|
|||
|
|||
AnnotationDefinition m_AnnotationDefinition; |
|||
EntityQuery m_EntityQuery; |
|||
Texture2D m_MissingTexture; |
|||
|
|||
/// <summary>
|
|||
/// Action that gets triggered when a new frame of key points are computed.
|
|||
/// </summary>
|
|||
public event Action<List<KeyPointEntry>> KeyPointsComputed; |
|||
|
|||
/// <summary>
|
|||
/// Creates a new key point labeler. This constructor creates a labeler that
|
|||
/// is not valid until a <see cref="IdLabelConfig"/> and <see cref="KeyPointTemplate"/>
|
|||
/// are assigned.
|
|||
/// </summary>
|
|||
public KeyPointLabeler() { } |
|||
|
|||
/// <summary>
|
|||
/// Creates a new key point labeler.
|
|||
/// </summary>
|
|||
/// <param name="config">The Id label config for the labeler</param>
|
|||
/// <param name="template">The active keypoint template</param>
|
|||
public KeyPointLabeler(IdLabelConfig config, KeyPointTemplate template) |
|||
{ |
|||
this.idLabelConfig = config; |
|||
this.activeTemplate = template; |
|||
} |
|||
|
|||
/// <summary>
|
|||
/// Array of animation pose labels which map animation clip times to ground truth pose labels.
|
|||
/// </summary>
|
|||
public AnimationPoseLabel[] poseStateConfigs; |
|||
|
|||
/// <inheritdoc/>
|
|||
protected override void Setup() |
|||
{ |
|||
if (idLabelConfig == null) |
|||
throw new InvalidOperationException("KeyPointLabeler's idLabelConfig field must be assigned"); |
|||
|
|||
m_AnnotationDefinition = DatasetCapture.RegisterAnnotationDefinition("keypoints", new []{TemplateToJson(activeTemplate)}, |
|||
"pixel coordinates of keypoints in a model, along with skeletal connectivity data", id: new Guid(annotationId)); |
|||
|
|||
m_EntityQuery = World.DefaultGameObjectInjectionWorld.EntityManager.CreateEntityQuery(typeof(Labeling), typeof(GroundTruthInfo)); |
|||
|
|||
m_KeyPointEntries = new List<KeyPointEntry>(); |
|||
|
|||
// Texture to use in case the template does not contain a texture for the joints or the skeletal connections
|
|||
m_MissingTexture = new Texture2D(1, 1); |
|||
|
|||
m_KnownStatus = new Dictionary<uint, CachedData>(); |
|||
} |
|||
|
|||
/// <inheritdoc/>
|
|||
protected override void OnBeginRendering() |
|||
{ |
|||
var reporter = perceptionCamera.SensorHandle.ReportAnnotationAsync(m_AnnotationDefinition); |
|||
|
|||
var entities = m_EntityQuery.ToEntityArray(Allocator.TempJob); |
|||
var entityManager = World.DefaultGameObjectInjectionWorld.EntityManager; |
|||
|
|||
m_KeyPointEntries.Clear(); |
|||
|
|||
foreach (var entity in entities) |
|||
{ |
|||
ProcessEntity(entityManager.GetComponentObject<Labeling>(entity)); |
|||
} |
|||
|
|||
entities.Dispose(); |
|||
|
|||
KeyPointsComputed?.Invoke(m_KeyPointEntries); |
|||
reporter.ReportValues(m_KeyPointEntries); |
|||
} |
|||
|
|||
// ReSharper disable InconsistentNaming
|
|||
// ReSharper disable NotAccessedField.Global
|
|||
// ReSharper disable NotAccessedField.Local
|
|||
/// <summary>
|
|||
/// Record storing all of the keypoint data of a labeled gameobject.
|
|||
/// </summary>
|
|||
[Serializable] |
|||
public class KeyPointEntry |
|||
{ |
|||
/// <summary>
|
|||
/// The label id of the entity
|
|||
/// </summary>
|
|||
public int label_id; |
|||
/// <summary>
|
|||
/// The instance id of the entity
|
|||
/// </summary>
|
|||
public uint instance_id; |
|||
/// <summary>
|
|||
/// The template that the points are based on
|
|||
/// </summary>
|
|||
public string template_guid; |
|||
/// <summary>
|
|||
/// Pose ground truth for the current set of keypoints
|
|||
/// </summary>
|
|||
public string pose = "unset"; |
|||
/// <summary>
|
|||
/// Array of all of the keypoints
|
|||
/// </summary>
|
|||
public KeyPoint[] keypoints; |
|||
} |
|||
|
|||
/// <summary>
|
|||
/// The values of a specific keypoint
|
|||
/// </summary>
|
|||
[Serializable] |
|||
public class KeyPoint |
|||
{ |
|||
/// <summary>
|
|||
/// The index of the keypoint in the template file
|
|||
/// </summary>
|
|||
public int index; |
|||
/// <summary>
|
|||
/// The keypoint's x-coordinate pixel location
|
|||
/// </summary>
|
|||
public float x; |
|||
/// <summary>
|
|||
/// The keypoint's y-coordinate pixel location
|
|||
/// </summary>
|
|||
public float y; |
|||
/// <summary>
|
|||
/// The state of the point, 0 = not present, 1 = keypoint is present
|
|||
/// </summary>
|
|||
public int state; |
|||
} |
|||
// ReSharper restore InconsistentNaming
|
|||
// ReSharper restore NotAccessedField.Global
|
|||
// ReSharper restore NotAccessedField.Local
|
|||
|
|||
// Converts a coordinate from world space into pixel space
|
|||
Vector3 ConvertToScreenSpace(Vector3 worldLocation) |
|||
{ |
|||
var pt = perceptionCamera.attachedCamera.WorldToScreenPoint(worldLocation); |
|||
pt.y = Screen.height - pt.y; |
|||
return pt; |
|||
} |
|||
|
|||
List<KeyPointEntry> m_KeyPointEntries; |
|||
|
|||
struct CachedData |
|||
{ |
|||
public bool status; |
|||
public Animator animator; |
|||
public KeyPointEntry keyPoints; |
|||
public List<(JointLabel, int)> overrides; |
|||
} |
|||
|
|||
Dictionary<uint, CachedData> m_KnownStatus; |
|||
|
|||
bool TryToGetTemplateIndexForJoint(KeyPointTemplate template, JointLabel joint, out int index) |
|||
{ |
|||
index = -1; |
|||
|
|||
foreach (var jointTemplate in joint.templateInformation.Where(jointTemplate => jointTemplate.template == template)) |
|||
{ |
|||
for (var i = 0; i < template.keyPoints.Length; i++) |
|||
{ |
|||
if (template.keyPoints[i].label == jointTemplate.label) |
|||
{ |
|||
index = i; |
|||
return true; |
|||
} |
|||
} |
|||
} |
|||
|
|||
return false; |
|||
} |
|||
|
|||
bool DoesTemplateContainJoint(JointLabel jointLabel) |
|||
{ |
|||
foreach (var template in jointLabel.templateInformation) |
|||
{ |
|||
if (template.template == activeTemplate) |
|||
{ |
|||
if (activeTemplate.keyPoints.Any(i => i.label == template.label)) |
|||
{ |
|||
return true; |
|||
} |
|||
} |
|||
} |
|||
|
|||
return false; |
|||
} |
|||
|
|||
void ProcessEntity(Labeling labeledEntity) |
|||
{ |
|||
// Cache out the data of a labeled game object the first time we see it, this will
|
|||
// save performance each frame. Also checks to see if a labeled game object can be annotated.
|
|||
if (!m_KnownStatus.ContainsKey(labeledEntity.instanceId)) |
|||
{ |
|||
var cached = new CachedData() |
|||
{ |
|||
status = false, |
|||
animator = null, |
|||
keyPoints = new KeyPointEntry(), |
|||
overrides = new List<(JointLabel, int)>() |
|||
}; |
|||
|
|||
if (idLabelConfig.TryGetLabelEntryFromInstanceId(labeledEntity.instanceId, out var labelEntry)) |
|||
{ |
|||
var entityGameObject = labeledEntity.gameObject; |
|||
|
|||
cached.keyPoints.instance_id = labeledEntity.instanceId; |
|||
cached.keyPoints.label_id = labelEntry.id; |
|||
cached.keyPoints.template_guid = activeTemplate.templateID.ToString(); |
|||
|
|||
cached.keyPoints.keypoints = new KeyPoint[activeTemplate.keyPoints.Length]; |
|||
for (var i = 0; i < cached.keyPoints.keypoints.Length; i++) |
|||
{ |
|||
cached.keyPoints.keypoints[i] = new KeyPoint { index = i, state = 0 }; |
|||
} |
|||
|
|||
var animator = entityGameObject.transform.GetComponentInChildren<Animator>(); |
|||
if (animator != null) |
|||
{ |
|||
cached.animator = animator; |
|||
cached.status = true; |
|||
} |
|||
|
|||
foreach (var joint in entityGameObject.transform.GetComponentsInChildren<JointLabel>()) |
|||
{ |
|||
if (TryToGetTemplateIndexForJoint(activeTemplate, joint, out var idx)) |
|||
{ |
|||
cached.overrides.Add((joint, idx)); |
|||
cached.status = true; |
|||
} |
|||
} |
|||
} |
|||
|
|||
m_KnownStatus[labeledEntity.instanceId] = cached; |
|||
} |
|||
|
|||
var cachedData = m_KnownStatus[labeledEntity.instanceId]; |
|||
|
|||
if (cachedData.status) |
|||
{ |
|||
var animator = cachedData.animator; |
|||
var keyPoints = cachedData.keyPoints.keypoints; |
|||
|
|||
// Go through all of the rig keypoints and get their location
|
|||
for (var i = 0; i < activeTemplate.keyPoints.Length; i++) |
|||
{ |
|||
var pt = activeTemplate.keyPoints[i]; |
|||
if (pt.associateToRig) |
|||
{ |
|||
var bone = animator.GetBoneTransform(pt.rigLabel); |
|||
if (bone != null) |
|||
{ |
|||
var loc = ConvertToScreenSpace(bone.position); |
|||
keyPoints[i].index = i; |
|||
keyPoints[i].x = loc.x; |
|||
keyPoints[i].y = loc.y; |
|||
keyPoints[i].state = 2; |
|||
} |
|||
} |
|||
} |
|||
|
|||
// Go through all of the additional or override points defined by joint labels and get
|
|||
// their locations
|
|||
foreach (var (joint, idx) in cachedData.overrides) |
|||
{ |
|||
var loc = ConvertToScreenSpace(joint.transform.position); |
|||
keyPoints[idx].index = idx; |
|||
keyPoints[idx].x = loc.x; |
|||
keyPoints[idx].y = loc.y; |
|||
keyPoints[idx].state = 1; |
|||
} |
|||
|
|||
cachedData.keyPoints.pose = "unset"; |
|||
|
|||
if (cachedData.animator != null) |
|||
{ |
|||
cachedData.keyPoints.pose = GetPose(cachedData.animator); |
|||
} |
|||
|
|||
m_KeyPointEntries.Add(cachedData.keyPoints); |
|||
} |
|||
} |
|||
|
|||
string GetPose(Animator animator) |
|||
{ |
|||
var info = animator.GetCurrentAnimatorClipInfo(0); |
|||
|
|||
if (info != null && info.Length > 0) |
|||
{ |
|||
var clip = info[0].clip; |
|||
var timeOffset = animator.GetCurrentAnimatorStateInfo(0).normalizedTime; |
|||
|
|||
if (poseStateConfigs != null) |
|||
{ |
|||
foreach (var p in poseStateConfigs) |
|||
{ |
|||
if (p.animationClip == clip) |
|||
{ |
|||
var time = timeOffset; |
|||
var label = p.GetPoseAtTime(time); |
|||
return label; |
|||
} |
|||
} |
|||
} |
|||
} |
|||
|
|||
return "unset"; |
|||
} |
|||
|
|||
/// <inheritdoc/>
|
|||
protected override void OnVisualize() |
|||
{ |
|||
var jointTexture = activeTemplate.jointTexture; |
|||
if (jointTexture == null) jointTexture = m_MissingTexture; |
|||
|
|||
var skeletonTexture = activeTemplate.skeletonTexture; |
|||
if (skeletonTexture == null) skeletonTexture = m_MissingTexture; |
|||
|
|||
foreach (var entry in m_KeyPointEntries) |
|||
{ |
|||
foreach (var bone in activeTemplate.skeleton) |
|||
{ |
|||
var joint1 = entry.keypoints[bone.joint1]; |
|||
var joint2 = entry.keypoints[bone.joint2]; |
|||
|
|||
if (joint1.state != 0 && joint2.state != 0) |
|||
{ |
|||
VisualizationHelper.DrawLine(joint1.x, joint1.y, joint2.x, joint2.y, bone.color, 8, skeletonTexture); |
|||
} |
|||
} |
|||
|
|||
foreach (var keypoint in entry.keypoints) |
|||
{ |
|||
if (keypoint.state != 0) |
|||
VisualizationHelper.DrawPoint(keypoint.x, keypoint.y, activeTemplate.keyPoints[keypoint.index].color, 8, jointTexture); |
|||
} |
|||
} |
|||
} |
|||
|
|||
// ReSharper disable InconsistentNaming
|
|||
// ReSharper disable NotAccessedField.Local
|
|||
[Serializable] |
|||
struct JointJson |
|||
{ |
|||
public string label; |
|||
public int index; |
|||
} |
|||
|
|||
[Serializable] |
|||
struct SkeletonJson |
|||
{ |
|||
public int joint1; |
|||
public int joint2; |
|||
} |
|||
|
|||
[Serializable] |
|||
struct KeyPointJson |
|||
{ |
|||
public string template_id; |
|||
public string template_name; |
|||
public JointJson[] key_points; |
|||
public SkeletonJson[] skeleton; |
|||
} |
|||
// ReSharper restore InconsistentNaming
|
|||
// ReSharper restore NotAccessedField.Local
|
|||
|
|||
KeyPointJson TemplateToJson(KeyPointTemplate input) |
|||
{ |
|||
var json = new KeyPointJson(); |
|||
json.template_id = input.templateID.ToString(); |
|||
json.template_name = input.templateName; |
|||
json.key_points = new JointJson[input.keyPoints.Length]; |
|||
json.skeleton = new SkeletonJson[input.skeleton.Length]; |
|||
|
|||
for (var i = 0; i < input.keyPoints.Length; i++) |
|||
{ |
|||
json.key_points[i] = new JointJson |
|||
{ |
|||
label = input.keyPoints[i].label, |
|||
index = i |
|||
}; |
|||
} |
|||
|
|||
for (var i = 0; i < input.skeleton.Length; i++) |
|||
{ |
|||
json.skeleton[i] = new SkeletonJson() |
|||
{ |
|||
joint1 = input.skeleton[i].joint1, |
|||
joint2 = input.skeleton[i].joint2 |
|||
}; |
|||
} |
|||
|
|||
return json; |
|||
} |
|||
} |
|||
} |
|||
|
|||
fileFormatVersion: 2 |
|||
guid: 377d37b913b843b6985fa57c13cb732c |
|||
timeCreated: 1610383503 |
|||
|
|||
using System; |
|||
|
|||
namespace UnityEngine.Perception.GroundTruth |
|||
{ |
|||
/// <summary>
|
|||
/// A definition of a keypoint (joint).
|
|||
/// </summary>
|
|||
[Serializable] |
|||
public class KeyPointDefinition |
|||
{ |
|||
/// <summary>
|
|||
/// The name of the keypoint
|
|||
/// </summary>
|
|||
public string label; |
|||
/// <summary>
|
|||
/// Does this keypoint map directly to a <see cref="Animator"/> <see cref="Avatar"/> <see cref="HumanBodyBones"/>
|
|||
/// </summary>
|
|||
public bool associateToRig = true; |
|||
/// <summary>
|
|||
/// The associated <see cref="HumanBodyBones"/> of the rig
|
|||
/// </summary>
|
|||
public HumanBodyBones rigLabel = HumanBodyBones.Head; |
|||
/// <summary>
|
|||
/// The color of the keypoint in the visualization
|
|||
/// </summary>
|
|||
public Color color; |
|||
} |
|||
|
|||
/// <summary>
|
|||
/// A skeletal connection between two joints.
|
|||
/// </summary>
|
|||
[Serializable] |
|||
public class SkeletonDefinition |
|||
{ |
|||
/// <summary>
|
|||
/// The first joint
|
|||
/// </summary>
|
|||
public int joint1; |
|||
/// <summary>
|
|||
/// The second joint
|
|||
/// </summary>
|
|||
public int joint2; |
|||
/// <summary>
|
|||
/// The color of the skeleton in the visualization
|
|||
/// </summary>
|
|||
public Color color; |
|||
} |
|||
|
|||
/// <summary>
|
|||
/// Template used to define the keypoints of a humanoid asset.
|
|||
/// </summary>
|
|||
[CreateAssetMenu(fileName = "KeypointTemplate", menuName = "Perception/Keypoint Template", order = 2)] |
|||
public class KeyPointTemplate : ScriptableObject |
|||
{ |
|||
/// <summary>
|
|||
/// The <see cref="Guid"/> of the template
|
|||
/// </summary>
|
|||
public string templateID = Guid.NewGuid().ToString(); |
|||
/// <summary>
|
|||
/// The name of the template
|
|||
/// </summary>
|
|||
public string templateName; |
|||
/// <summary>
|
|||
/// Texture to use for the visualization of the joint.
|
|||
/// </summary>
|
|||
public Texture2D jointTexture; |
|||
/// <summary>
|
|||
/// Texture to use for the visualization of the skeletal connection.
|
|||
/// </summary>
|
|||
public Texture2D skeletonTexture; |
|||
/// <summary>
|
|||
/// Array of <see cref="KeyPointDefinition"/> for the template.
|
|||
/// </summary>
|
|||
public KeyPointDefinition[] keyPoints; |
|||
/// <summary>
|
|||
/// Array of the <see cref="SkeletonDefinition"/> for the template.
|
|||
/// </summary>
|
|||
public SkeletonDefinition[] skeleton; |
|||
} |
|||
} |
|||
|
|||
fileFormatVersion: 2 |
|||
guid: 37a7d6f1a40c45a2981a6291f0d03337 |
|||
timeCreated: 1610633739 |
|||
|
|||
namespace UnityEngine.Perception.GroundTruth |
|||
{ |
|||
/// <summary>
|
|||
/// Helper class that contains common visualization methods useful to ground truth labelers.
|
|||
/// </summary>
|
|||
public static class VisualizationHelper |
|||
{ |
|||
static Texture2D s_OnePixel = new Texture2D(1, 1); |
|||
|
|||
/// <summary>
|
|||
/// Converts a 3D world space coordinate to image pixel space.
|
|||
/// </summary>
|
|||
/// <param name="camera">The rendering camera</param>
|
|||
/// <param name="worldLocation">The 3D world location to convert</param>
|
|||
/// <returns>The coordinate in pixel space</returns>
|
|||
public static Vector3 ConvertToScreenSpace(Camera camera, Vector3 worldLocation) |
|||
{ |
|||
var pt = camera.WorldToScreenPoint(worldLocation); |
|||
pt.y = Screen.height - pt.y; |
|||
return pt; |
|||
} |
|||
|
|||
static Rect ToBoxRect(float x, float y, float halfSize = 3.0f) |
|||
{ |
|||
return new Rect(x - halfSize, y - halfSize, halfSize * 2, halfSize * 2); |
|||
} |
|||
|
|||
/// <summary>
|
|||
/// Draw a point (in pixel space) on the screen
|
|||
/// </summary>
|
|||
/// <param name="pt">The point location, in pixel space</param>
|
|||
/// <param name="color">The color of the point</param>
|
|||
/// <param name="width">The width of the point</param>
|
|||
/// <param name="texture">The texture to use for the point, defaults to a solid pixel</param>
|
|||
public static void DrawPoint(Vector3 pt, Color color, float width = 4.0f, Texture texture = null) |
|||
{ |
|||
DrawPoint(pt.x, pt.y, color, width, texture); |
|||
} |
|||
|
|||
/// <summary>
|
|||
/// Draw a point (in pixel space) on the screen
|
|||
/// </summary>
|
|||
/// <param name="x">The point's x value, in pixel space</param>
|
|||
/// <param name="y">The point's y value, in pixel space</param>
|
|||
/// <param name="color">The color of the point</param>
|
|||
/// <param name="width">The width of the point</param>
|
|||
/// <param name="texture">The texture to use for the point, defaults to a solid pixel</param>
|
|||
public static void DrawPoint(float x, float y, Color color, float width = 4, Texture texture = null) |
|||
{ |
|||
if (texture == null) texture = s_OnePixel; |
|||
var oldColor = GUI.color; |
|||
GUI.color = color; |
|||
GUI.DrawTexture(ToBoxRect(x, y, width * 0.5f), texture); |
|||
GUI.color = oldColor; |
|||
} |
|||
|
|||
static float Magnitude(float p1X, float p1Y, float p2X, float p2Y) |
|||
{ |
|||
var x = p2X - p1X; |
|||
var y = p2Y - p1Y; |
|||
return Mathf.Sqrt(x * x + y * y); |
|||
} |
|||
|
|||
/// <summary>
|
|||
/// Draw's a texture between two locations of a passed in width.
|
|||
/// </summary>
|
|||
/// <param name="p1">The start point in pixel space</param>
|
|||
/// <param name="p2">The end point in pixel space</param>
|
|||
/// <param name="color">The color of the line</param>
|
|||
/// <param name="width">The width of the line</param>
|
|||
/// <param name="texture">The texture to use, if null, will draw a solid line of passed in color</param>
|
|||
public static void DrawLine(Vector2 p1, Vector2 p2, Color color, float width = 3.0f, Texture texture = null) |
|||
{ |
|||
DrawLine(p1.x, p1.y, p2.x, p2.y, color, width, texture); |
|||
} |
|||
|
|||
/// <summary>
|
|||
/// Draw's a texture between two locations of a passed in width.
|
|||
/// </summary>
|
|||
/// <param name="p1X">The start point's x coordinate in pixel space</param>
|
|||
/// <param name="p1Y">The start point's y coordinate in pixel space</param>
|
|||
/// <param name="p2X">The end point's x coordinate in pixel space</param>
|
|||
/// <param name="p2Y">The end point's y coordinate in pixel space</param>
|
|||
/// <param name="color">The color of the line</param>
|
|||
/// <param name="width">The width of the line</param>
|
|||
/// <param name="texture">The texture to use, if null, will draw a solid line of passed in color</param>
|
|||
public static void DrawLine (float p1X, float p1Y, float p2X, float p2Y, Color color, float width = 3.0f, Texture texture = null) |
|||
{ |
|||
if (texture == null) texture = s_OnePixel; |
|||
|
|||
var oldColor = GUI.color; |
|||
|
|||
GUI.color = color; |
|||
|
|||
var matrixBackup = GUI.matrix; |
|||
var angle = Mathf.Atan2 (p2Y - p1Y, p2X - p1X) * 180f / Mathf.PI; |
|||
|
|||
var length = Magnitude(p1X, p1Y, p2X, p2Y); |
|||
|
|||
GUIUtility.RotateAroundPivot (angle, new Vector2(p1X, p1Y)); |
|||
var halfWidth = width * 0.5f; |
|||
GUI.DrawTexture (new Rect (p1X - halfWidth, p1Y - halfWidth, length, width), texture); |
|||
|
|||
GUI.matrix = matrixBackup; |
|||
GUI.color = oldColor; |
|||
} |
|||
|
|||
} |
|||
} |
|||
|
|||
fileFormatVersion: 2 |
|||
guid: b4ef50bfa62549848a6d12c049397eba |
|||
timeCreated: 1611019489 |
|||
|
|||
%YAML 1.1 |
|||
%TAG !u! tag:unity3d.com,2011: |
|||
--- !u!91 &9100000 |
|||
AnimatorController: |
|||
m_ObjectHideFlags: 0 |
|||
m_CorrespondingSourceObject: {fileID: 0} |
|||
m_PrefabInstance: {fileID: 0} |
|||
m_PrefabAsset: {fileID: 0} |
|||
m_Name: AnimationRandomizerController |
|||
serializedVersion: 5 |
|||
m_AnimatorParameters: [] |
|||
m_AnimatorLayers: |
|||
- serializedVersion: 5 |
|||
m_Name: Base Layer |
|||
m_StateMachine: {fileID: 1300458365308884037} |
|||
m_Mask: {fileID: 0} |
|||
m_Motions: [] |
|||
m_Behaviours: [] |
|||
m_BlendingMode: 0 |
|||
m_SyncedLayerIndex: -1 |
|||
m_DefaultWeight: 0 |
|||
m_IKPass: 0 |
|||
m_SyncedLayerAffectsTiming: 0 |
|||
m_Controller: {fileID: 9100000} |
|||
--- !u!1107 &1300458365308884037 |
|||
AnimatorStateMachine: |
|||
serializedVersion: 5 |
|||
m_ObjectHideFlags: 1 |
|||
m_CorrespondingSourceObject: {fileID: 0} |
|||
m_PrefabInstance: {fileID: 0} |
|||
m_PrefabAsset: {fileID: 0} |
|||
m_Name: Base Layer |
|||
m_ChildStates: |
|||
- serializedVersion: 1 |
|||
m_State: {fileID: 3212544235944076811} |
|||
m_Position: {x: 390, y: 320, z: 0} |
|||
m_ChildStateMachines: [] |
|||
m_AnyStateTransitions: [] |
|||
m_EntryTransitions: [] |
|||
m_StateMachineTransitions: {} |
|||
m_StateMachineBehaviours: [] |
|||
m_AnyStatePosition: {x: 50, y: 20, z: 0} |
|||
m_EntryPosition: {x: 50, y: 120, z: 0} |
|||
m_ExitPosition: {x: 800, y: 120, z: 0} |
|||
m_ParentStateMachinePosition: {x: 800, y: 20, z: 0} |
|||
m_DefaultState: {fileID: 3212544235944076811} |
|||
--- !u!1102 &3212544235944076811 |
|||
AnimatorState: |
|||
serializedVersion: 5 |
|||
m_ObjectHideFlags: 1 |
|||
m_CorrespondingSourceObject: {fileID: 0} |
|||
m_PrefabInstance: {fileID: 0} |
|||
m_PrefabAsset: {fileID: 0} |
|||
m_Name: RandomState |
|||
m_Speed: 1 |
|||
m_CycleOffset: 0 |
|||
m_Transitions: [] |
|||
m_StateMachineBehaviours: [] |
|||
m_Position: {x: 50, y: 50, z: 0} |
|||
m_IKOnFeet: 0 |
|||
m_WriteDefaultValues: 1 |
|||
m_Mirror: 0 |
|||
m_SpeedParameterActive: 0 |
|||
m_MirrorParameterActive: 0 |
|||
m_CycleOffsetParameterActive: 0 |
|||
m_TimeParameterActive: 0 |
|||
m_Motion: {fileID: 7400000, guid: 11ff68761e3b74dbd84106361e9a4ec7, type: 2} |
|||
m_Tag: |
|||
m_SpeedParameter: |
|||
m_MirrorParameter: |
|||
m_CycleOffsetParameter: |
|||
m_TimeParameter: |
|||
|
|||
fileFormatVersion: 2 |
|||
guid: 492c555d00e884241a46c09b49877983 |
|||
NativeFormatImporter: |
|||
externalObjects: {} |
|||
mainObjectFileID: 9100000 |
|||
userData: |
|||
assetBundleName: |
|||
assetBundleVariant: |
|||
1001
com.unity.perception/Runtime/GroundTruth/Resources/PlayerIdle.anim
文件差异内容过多而无法显示
查看文件
文件差异内容过多而无法显示
查看文件
|
|||
fileFormatVersion: 2 |
|||
guid: 11ff68761e3b74dbd84106361e9a4ec7 |
|||
NativeFormatImporter: |
|||
externalObjects: {} |
|||
mainObjectFileID: 0 |
|||
userData: |
|||
assetBundleName: |
|||
assetBundleVariant: |
|||
{kind=link}
| 之前 | 之后 |
|---|---|

|
|
| 宽度: 32 | 高度: 32 | 大小: 847 B |
{kind=link}
|
|||
fileFormatVersion: 2 |
|||
guid: e381cbaaf29614168bafc8f7ec5dbfe9 |
|||
TextureImporter: |
|||
internalIDToNameTable: [] |
|||
externalObjects: {} |
|||
serializedVersion: 11 |
|||
mipmaps: |
|||
mipMapMode: 0 |
|||
enableMipMap: 0 |
|||
sRGBTexture: 1 |
|||
linearTexture: 0 |
|||
fadeOut: 0 |
|||
borderMipMap: 0 |
|||
mipMapsPreserveCoverage: 0 |
|||
alphaTestReferenceValue: 0.5 |
|||
mipMapFadeDistanceStart: 1 |
|||
mipMapFadeDistanceEnd: 3 |
|||
bumpmap: |
|||
convertToNormalMap: 0 |
|||
externalNormalMap: 0 |
|||
heightScale: 0.25 |
|||
normalMapFilter: 0 |
|||
isReadable: 0 |
|||
streamingMipmaps: 0 |
|||
streamingMipmapsPriority: 0 |
|||
vTOnly: 0 |
|||
grayScaleToAlpha: 0 |
|||
generateCubemap: 6 |
|||
cubemapConvolution: 0 |
|||
seamlessCubemap: 0 |
|||
textureFormat: 1 |
|||
maxTextureSize: 2048 |
|||
textureSettings: |
|||
serializedVersion: 2 |
|||
filterMode: -1 |
|||
aniso: -1 |
|||
mipBias: -100 |
|||
wrapU: 1 |
|||
wrapV: 1 |
|||
wrapW: -1 |
|||
nPOTScale: 0 |
|||
lightmap: 0 |
|||
compressionQuality: 50 |
|||
spriteMode: 1 |
|||
spriteExtrude: 1 |
|||
spriteMeshType: 1 |
|||
alignment: 0 |
|||
spritePivot: {x: 0.5, y: 0.5} |
|||
spritePixelsToUnits: 100 |
|||
spriteBorder: {x: 0, y: 0, z: 0, w: 0} |
|||
spriteGenerateFallbackPhysicsShape: 1 |
|||
alphaUsage: 1 |
|||
alphaIsTransparency: 1 |
|||
spriteTessellationDetail: -1 |
|||
textureType: 8 |
|||
textureShape: 1 |
|||
singleChannelComponent: 0 |
|||
flipbookRows: 1 |
|||
flipbookColumns: 1 |
|||
maxTextureSizeSet: 0 |
|||
compressionQualitySet: 0 |
|||
textureFormatSet: 0 |
|||
ignorePngGamma: 0 |
|||
applyGammaDecoding: 0 |
|||
platformSettings: |
|||
- serializedVersion: 3 |
|||
buildTarget: DefaultTexturePlatform |
|||
maxTextureSize: 2048 |
|||
resizeAlgorithm: 0 |
|||
textureFormat: -1 |
|||
textureCompression: 1 |
|||
compressionQuality: 50 |
|||
crunchedCompression: 0 |
|||
allowsAlphaSplitting: 0 |
|||
overridden: 0 |
|||
androidETC2FallbackOverride: 0 |
|||
forceMaximumCompressionQuality_BC6H_BC7: 0 |
|||
- serializedVersion: 3 |
|||
buildTarget: Standalone |
|||
maxTextureSize: 2048 |
|||
resizeAlgorithm: 0 |
|||
textureFormat: -1 |
|||
textureCompression: 1 |
|||
compressionQuality: 50 |
|||
crunchedCompression: 0 |
|||
allowsAlphaSplitting: 0 |
|||
overridden: 0 |
|||
androidETC2FallbackOverride: 0 |
|||
forceMaximumCompressionQuality_BC6H_BC7: 0 |
|||
spriteSheet: |
|||
serializedVersion: 2 |
|||
sprites: [] |
|||
outline: [] |
|||
physicsShape: [] |
|||
bones: [] |
|||
spriteID: 5e97eb03825dee720800000000000000 |
|||
internalID: 0 |
|||
vertices: [] |
|||
indices: |
|||
edges: [] |
|||
weights: [] |
|||
secondaryTextures: [] |
|||
spritePackingTag: |
|||
pSDRemoveMatte: 0 |
|||
pSDShowRemoveMatteOption: 0 |
|||
userData: |
|||
assetBundleName: |
|||
assetBundleVariant: |
|||
|
|||
using System; |
|||
|
|||
namespace UnityEngine.Experimental.Perception.Randomization.Parameters |
|||
{ |
|||
/// <summary>
|
|||
/// A categorical parameter for animation clips
|
|||
/// </summary>
|
|||
[Serializable] |
|||
public class AnimationClipParameter : CategoricalParameter<AnimationClip> { } |
|||
} |
|||
|
|||
fileFormatVersion: 2 |
|||
guid: 6af6ee532f5e4e4b83353f2f32105665 |
|||
timeCreated: 1610935882 |
|||
|
|||
using System; |
|||
using UnityEngine; |
|||
using UnityEngine.Experimental.Perception.Randomization.Parameters; |
|||
using UnityEngine.Experimental.Perception.Randomization.Randomizers.SampleRandomizers.Tags; |
|||
using UnityEngine.Experimental.Perception.Randomization.Samplers; |
|||
|
|||
namespace UnityEngine.Experimental.Perception.Randomization.Randomizers.SampleRandomizers |
|||
{ |
|||
/// <summary>
|
|||
/// Chooses a random of frame of a random clip for a game object
|
|||
/// </summary>
|
|||
[Serializable] |
|||
[AddRandomizerMenu("Perception/Animation Randomizer")] |
|||
public class AnimationRandomizer : Randomizer |
|||
{ |
|||
FloatParameter m_FloatParameter = new FloatParameter{ value = new UniformSampler(0, 1) }; |
|||
|
|||
const string k_ClipName = "PlayerIdle"; |
|||
const string k_StateName = "Base Layer.RandomState"; |
|||
|
|||
void RandomizeAnimation(AnimationRandomizerTag tag) |
|||
{ |
|||
var animator = tag.gameObject.GetComponent<Animator>(); |
|||
animator.applyRootMotion = tag.applyRootMotion; |
|||
|
|||
var overrider = tag.animatorOverrideController; |
|||
if (overrider != null && tag.animationClips.GetCategoryCount() > 0) |
|||
{ |
|||
overrider[k_ClipName] = tag.animationClips.Sample(); |
|||
animator.Play(k_StateName, 0, m_FloatParameter.Sample()); |
|||
} |
|||
} |
|||
|
|||
/// <inheritdoc/>
|
|||
protected override void OnIterationStart() |
|||
{ |
|||
if (m_FloatParameter == null) m_FloatParameter = new FloatParameter{ value = new UniformSampler(0, 1) }; |
|||
|
|||
var taggedObjects = tagManager.Query<AnimationRandomizerTag>(); |
|||
foreach (var taggedObject in taggedObjects) |
|||
{ |
|||
RandomizeAnimation(taggedObject); |
|||
} |
|||
} |
|||
} |
|||
} |
|||
|
|||
fileFormatVersion: 2 |
|||
guid: 8b57910cfd4a4dec90d6aa4a8ef824da |
|||
timeCreated: 1610802187 |
|||
|
|||
using UnityEngine.Experimental.Perception.Randomization.Parameters; |
|||
using UnityEngine.Perception.GroundTruth; |
|||
|
|||
namespace UnityEngine.Experimental.Perception.Randomization.Randomizers.SampleRandomizers.Tags |
|||
{ |
|||
/// <summary>
|
|||
/// Used in conjunction with a <see cref="AnimationRandomizer"/> to select a random animation frame for
|
|||
/// the tagged game object
|
|||
/// </summary>
|
|||
[RequireComponent(typeof(Animator))] |
|||
[AddComponentMenu("Perception/RandomizerTags/Animation Randomizer Tag")] |
|||
public class AnimationRandomizerTag : RandomizerTag |
|||
{ |
|||
/// <summary>
|
|||
/// A list of animation clips from which to choose
|
|||
/// </summary>
|
|||
public AnimationClipParameter animationClips; |
|||
|
|||
/// <summary>
|
|||
/// Apply the root motion to the animator. If true, if an animation has a rotation translation and/or rotation
|
|||
/// that will be applied to the labeled model, which means that the model maybe move to a new position.
|
|||
/// If false, then the model will stay at its current position/rotation.
|
|||
/// </summary>
|
|||
public bool applyRootMotion = false; |
|||
|
|||
/// <summary>
|
|||
/// Gets the animation override controller for an animation randomization. The controller is loaded from
|
|||
/// resources.
|
|||
/// </summary>
|
|||
public AnimatorOverrideController animatorOverrideController |
|||
{ |
|||
get |
|||
{ |
|||
if (m_Controller == null) |
|||
{ |
|||
var animator = gameObject.GetComponent<Animator>(); |
|||
var runtimeAnimatorController = Resources.Load<RuntimeAnimatorController>("AnimationRandomizerController"); |
|||
m_Controller = new AnimatorOverrideController(runtimeAnimatorController); |
|||
animator.runtimeAnimatorController = m_Controller; |
|||
} |
|||
|
|||
return m_Controller; |
|||
} |
|||
} |
|||
|
|||
AnimatorOverrideController m_Controller; |
|||
} |
|||
} |
|||
|
|||
fileFormatVersion: 2 |
|||
guid: f8943e41c7c34facb177a5decc1b2aef |
|||
timeCreated: 1610802367 |
|||
|
|||
using System; |
|||
using System.Collections; |
|||
using System.Collections.Generic; |
|||
using System.Linq; |
|||
using NUnit.Framework; |
|||
using UnityEngine; |
|||
using UnityEngine.Perception.GroundTruth; |
|||
using UnityEngine.TestTools; |
|||
|
|||
namespace GroundTruthTests |
|||
{ |
|||
[TestFixture] |
|||
public class KeyPointGroundTruthTests : GroundTruthTestBase |
|||
{ |
|||
static GameObject SetupCamera(IdLabelConfig config, KeyPointTemplate template, Action<List<KeyPointLabeler.KeyPointEntry>> computeListener) |
|||
{ |
|||
var cameraObject = new GameObject(); |
|||
cameraObject.SetActive(false); |
|||
var camera = cameraObject.AddComponent<Camera>(); |
|||
camera.orthographic = false; |
|||
camera.fieldOfView = 60; |
|||
camera.nearClipPlane = 0.3f; |
|||
camera.farClipPlane = 1000; |
|||
|
|||
camera.transform.position = new Vector3(0, 0, -10); |
|||
|
|||
var perceptionCamera = cameraObject.AddComponent<PerceptionCamera>(); |
|||
perceptionCamera.captureRgbImages = false; |
|||
var keyPointLabeler = new KeyPointLabeler(config, template); |
|||
if (computeListener != null) |
|||
keyPointLabeler.KeyPointsComputed += computeListener; |
|||
|
|||
perceptionCamera.AddLabeler(keyPointLabeler); |
|||
|
|||
return cameraObject; |
|||
} |
|||
|
|||
static KeyPointTemplate CreateTestTemplate(Guid guid, string label) |
|||
{ |
|||
var keyPoints = new[] |
|||
{ |
|||
new KeyPointDefinition |
|||
{ |
|||
label = "FrontLowerLeft", |
|||
associateToRig = false, |
|||
color = Color.black |
|||
}, |
|||
new KeyPointDefinition |
|||
{ |
|||
label = "FrontUpperLeft", |
|||
associateToRig = false, |
|||
color = Color.black |
|||
}, |
|||
new KeyPointDefinition |
|||
{ |
|||
label = "FrontUpperRight", |
|||
associateToRig = false, |
|||
color = Color.black |
|||
}, |
|||
new KeyPointDefinition |
|||
{ |
|||
label = "FrontLowerRight", |
|||
associateToRig = false, |
|||
color = Color.black |
|||
}, |
|||
new KeyPointDefinition |
|||
{ |
|||
label = "BackLowerLeft", |
|||
associateToRig = false, |
|||
color = Color.black |
|||
}, |
|||
new KeyPointDefinition |
|||
{ |
|||
label = "BackUpperLeft", |
|||
associateToRig = false, |
|||
color = Color.black |
|||
}, |
|||
new KeyPointDefinition |
|||
{ |
|||
label = "BackUpperRight", |
|||
associateToRig = false, |
|||
color = Color.black |
|||
}, |
|||
new KeyPointDefinition |
|||
{ |
|||
label = "BackLowerRight", |
|||
associateToRig = false, |
|||
color = Color.black |
|||
}, |
|||
new KeyPointDefinition |
|||
{ |
|||
label = "Center", |
|||
associateToRig = false, |
|||
color = Color.black |
|||
} |
|||
}; |
|||
|
|||
var skeleton = new[] |
|||
{ |
|||
new SkeletonDefinition |
|||
{ |
|||
joint1 = 0, |
|||
joint2 = 1, |
|||
color = Color.magenta |
|||
}, |
|||
new SkeletonDefinition |
|||
{ |
|||
joint1 = 1, |
|||
joint2 = 2, |
|||
color = Color.magenta |
|||
}, |
|||
new SkeletonDefinition |
|||
{ |
|||
joint1 = 2, |
|||
joint2 = 3, |
|||
color = Color.magenta |
|||
}, |
|||
new SkeletonDefinition |
|||
{ |
|||
joint1 = 3, |
|||
joint2 = 0, |
|||
color = Color.magenta |
|||
}, |
|||
|
|||
new SkeletonDefinition |
|||
{ |
|||
joint1 = 4, |
|||
joint2 = 5, |
|||
color = Color.blue |
|||
}, |
|||
new SkeletonDefinition |
|||
{ |
|||
joint1 = 5, |
|||
joint2 = 6, |
|||
color = Color.blue |
|||
}, |
|||
new SkeletonDefinition |
|||
{ |
|||
joint1 = 6, |
|||
joint2 = 7, |
|||
color = Color.blue |
|||
}, |
|||
new SkeletonDefinition |
|||
{ |
|||
joint1 = 7, |
|||
joint2 = 4, |
|||
color = Color.blue |
|||
}, |
|||
|
|||
new SkeletonDefinition |
|||
{ |
|||
joint1 = 0, |
|||
joint2 = 4, |
|||
color = Color.green |
|||
}, |
|||
new SkeletonDefinition |
|||
{ |
|||
joint1 = 1, |
|||
joint2 = 5, |
|||
color = Color.green |
|||
}, |
|||
new SkeletonDefinition |
|||
{ |
|||
joint1 = 2, |
|||
joint2 = 6, |
|||
color = Color.green |
|||
}, |
|||
new SkeletonDefinition |
|||
{ |
|||
joint1 = 3, |
|||
joint2 = 7, |
|||
color = Color.green |
|||
}, |
|||
}; |
|||
|
|||
var template = ScriptableObject.CreateInstance<KeyPointTemplate>(); |
|||
template.templateID = guid.ToString(); |
|||
template.templateName = label; |
|||
template.jointTexture = null; |
|||
template.skeletonTexture = null; |
|||
template.keyPoints = keyPoints; |
|||
template.skeleton = skeleton; |
|||
|
|||
return template; |
|||
} |
|||
|
|||
[Test] |
|||
public void KeypointTemplate_CreateTemplateTest() |
|||
{ |
|||
var guid = Guid.NewGuid(); |
|||
const string label = "TestTemplate"; |
|||
var template = CreateTestTemplate(guid, label); |
|||
|
|||
Assert.AreEqual(template.templateID, guid.ToString()); |
|||
Assert.AreEqual(template.templateName, label); |
|||
Assert.IsNull(template.jointTexture); |
|||
Assert.IsNull(template.skeletonTexture); |
|||
Assert.IsNotNull(template.keyPoints); |
|||
Assert.IsNotNull(template.skeleton); |
|||
Assert.AreEqual(template.keyPoints.Length, 9); |
|||
Assert.AreEqual(template.skeleton.Length, 12); |
|||
|
|||
var k0 = template.keyPoints[0]; |
|||
Assert.NotNull(k0); |
|||
Assert.AreEqual(k0.label, "FrontLowerLeft"); |
|||
Assert.False(k0.associateToRig); |
|||
Assert.AreEqual(k0.color, Color.black); |
|||
|
|||
var s0 = template.skeleton[0]; |
|||
Assert.NotNull(s0); |
|||
Assert.AreEqual(s0.joint1, 0); |
|||
Assert.AreEqual(s0.joint2, 1); |
|||
Assert.AreEqual(s0.color, Color.magenta); |
|||
} |
|||
|
|||
static IdLabelConfig SetUpLabelConfig() |
|||
{ |
|||
var cfg = ScriptableObject.CreateInstance<IdLabelConfig>(); |
|||
cfg.Init(new List<IdLabelEntry>() |
|||
{ |
|||
new IdLabelEntry |
|||
{ |
|||
id = 1, |
|||
label = "label" |
|||
} |
|||
}); |
|||
|
|||
return cfg; |
|||
} |
|||
|
|||
static void SetupCubeJoint(GameObject cube, KeyPointTemplate template, string label, float x, float y, float z) |
|||
{ |
|||
var joint = new GameObject(); |
|||
joint.transform.parent = cube.transform; |
|||
joint.transform.localPosition = new Vector3(x, y, z); |
|||
var jointLabel = joint.AddComponent<JointLabel>(); |
|||
jointLabel.templateInformation = new List<JointLabel.TemplateData>(); |
|||
var templateData = new JointLabel.TemplateData |
|||
{ |
|||
template = template, |
|||
label = label |
|||
}; |
|||
jointLabel.templateInformation.Add(templateData); |
|||
} |
|||
|
|||
static void SetupCubeJoints(GameObject cube, KeyPointTemplate template) |
|||
{ |
|||
SetupCubeJoint(cube, template, "FrontLowerLeft", -0.5f, -0.5f, -0.5f); |
|||
SetupCubeJoint(cube, template, "FrontUpperLeft", -0.5f, 0.5f, -0.5f); |
|||
SetupCubeJoint(cube, template, "FrontUpperRight", 0.5f, 0.5f, -0.5f); |
|||
SetupCubeJoint(cube, template, "FrontLowerRight", 0.5f, -0.5f, -0.5f); |
|||
SetupCubeJoint(cube, template, "BackLowerLeft", -0.5f, -0.5f, 0.5f); |
|||
SetupCubeJoint(cube, template, "BackUpperLeft", -0.5f, 0.5f, 0.5f); |
|||
SetupCubeJoint(cube, template, "BackUpperRight", 0.5f, 0.5f, 0.5f); |
|||
SetupCubeJoint(cube, template, "BackLowerRight", 0.5f, -0.5f, 0.5f); |
|||
} |
|||
|
|||
[UnityTest] |
|||
public IEnumerator Keypoint_TestStaticLabeledCube() |
|||
{ |
|||
var incoming = new List<List<KeyPointLabeler.KeyPointEntry>>(); |
|||
var template = CreateTestTemplate(Guid.NewGuid(), "TestTemplate"); |
|||
|
|||
var cam = SetupCamera(SetUpLabelConfig(), template, (data) => |
|||
{ |
|||
incoming.Add(data); |
|||
}); |
|||
|
|||
var cube = TestHelper.CreateLabeledCube(scale: 6, z: 8); |
|||
SetupCubeJoints(cube, template); |
|||
|
|||
cube.SetActive(true); |
|||
cam.SetActive(true); |
|||
|
|||
AddTestObjectForCleanup(cam); |
|||
AddTestObjectForCleanup(cube); |
|||
|
|||
yield return null; |
|||
yield return null; |
|||
|
|||
var testCase = incoming.Last(); |
|||
Assert.AreEqual(1, testCase.Count); |
|||
var t = testCase.First(); |
|||
Assert.NotNull(t); |
|||
Assert.AreEqual(1, t.instance_id); |
|||
Assert.AreEqual(1, t.label_id); |
|||
Assert.AreEqual(template.templateID.ToString(), t.template_guid); |
|||
Assert.AreEqual(9, t.keypoints.Length); |
|||
|
|||
Assert.AreEqual(t.keypoints[0].x, t.keypoints[1].x); |
|||
Assert.AreEqual(t.keypoints[2].x, t.keypoints[3].x); |
|||
Assert.AreEqual(t.keypoints[4].x, t.keypoints[5].x); |
|||
Assert.AreEqual(t.keypoints[6].x, t.keypoints[7].x); |
|||
|
|||
Assert.AreEqual(t.keypoints[0].y, t.keypoints[3].y); |
|||
Assert.AreEqual(t.keypoints[1].y, t.keypoints[2].y); |
|||
Assert.AreEqual(t.keypoints[4].y, t.keypoints[7].y); |
|||
Assert.AreEqual(t.keypoints[5].y, t.keypoints[6].y); |
|||
|
|||
for (var i = 0; i < 9; i++) Assert.AreEqual(i, t.keypoints[i].index); |
|||
for (var i = 0; i < 8; i++) Assert.AreEqual(1, t.keypoints[i].state); |
|||
Assert.Zero(t.keypoints[8].state); |
|||
Assert.Zero(t.keypoints[8].x); |
|||
Assert.Zero(t.keypoints[8].y); |
|||
} |
|||
} |
|||
} |
|||
|
|||
fileFormatVersion: 2 |
|||
guid: c62092ba10e4e4a80a0ec03e6e92593a |
|||
MonoImporter: |
|||
externalObjects: {} |
|||
serializedVersion: 2 |
|||
defaultReferences: [] |
|||
executionOrder: 0 |
|||
icon: {instanceID: 0} |
|||
userData: |
|||
assetBundleName: |
|||
assetBundleVariant: |
|||
撰写
预览
正在加载...
取消
保存
Reference in new issue