> com.unity.perception is in active development. Its features and API are subject to significant change as development progresses.
The [Unity Simulation Smart Camera Example](https://github.com/Unity-Technologies/Unity-Simulation-Smart-Camera-Outdoor) illustrates how the Perception package could be used in a smart city or autonomous vehicle simulation. You can generate datasets locally or at scale in [Unity Simulation](https://unity.com/products/unity-simulation).
The [Robotics Object Pose Estimation Demo & Tutorial](https://github.com/Unity-Technologies/Robotics-Object-Pose-Estimation) demonstrates pick-and-place with a robot arm in Unity. It includes using ROS with Unity, importing URDF models, collecting labeled training data using the Perception package, and training and deploying a deep learning model.
## Local development
The repository includes two projects for local development in `TestProjects` folder, one set up for HDRP and the other for URP.
## License
* [License](com.unity.perception/LICENSE.md)
## Support
## Community and Feedback
For general questions or concerns please contact the Computer Vision team at computer-vision@unity3d.com.
For setup problems or discussions about leveraging the Perception package in your project, please create a new thread on the [Unity Computer Vision forum](https://forum.unity.com/forums/computer-vision.626/) and make sure to include as much detail as possible. If you run into any other problems with the Perception package or have a specific feature request, please submit a [GitHub issue](https://github.com/Unity-Technologies/com.unity.perception/issues).
For feedback, bugs, or other issues please file a GitHub issue and the Computer Vision team will investigate the issue as soon as possible.
For any other questions or feedback, connect directly with the Computer Vision team at [computer-vision@unity3d.com](mailto:computer-vision@unity3d.com).
## Citation
If you find this package useful, consider citing it using:
Increased color variety in instance segmentation images
The PoissonDiskSampling utility now samples a larger region of points to then crop to size of the intended region to prevent edge case bias.
### Deprecated
Fixed keypoint labeling bug when visualizations are disabled.
Fixed an issue where Simulation Delta Time values larger than 100 seconds (in Perception Camera) would cause incorrect capture scheduling behavior.
## [0.8.0-preview.3] - 2021-03-24
### Changed
Expanded documentation on the Keypoint Labeler
Updated Keypoint Labeler logic to only report keypoints for visible objects by default
Increased color variety in instance segmentation images
### Fixed
Fixed compiler warnings in projects with HDRP on 2020.1 and later
Fixed a bug in the Normal Sampler where it would return values less than the passed in minimum value, or greater than the passed in maximum value, for random values very close to 0 or 1 respectively.
In the above annotation, all of the 18 joints defined in the COCO template we used are listed. For each joint that is present in our character, you can see the X and Y coordinates within the captured frame. However, you may notice three of the joints are listed with (0,0) coordinates. These joints are not present in our character. A fact that is also denoted by the `state` field. A state of **0** means the joint was not present, **1** denotes a joint that is present but not visible (to be implemented in a later version of the package), and **2** means the joint was present and visible.
In the above annotation, all of the 18 joints defined in the COCO template we used are listed. For each joint that is present in our character, you can see the X and Y coordinates within the captured frame. However, you may notice three of the joints are listed with (0,0) coordinates. These joints are not present in our character. A fact that is also denoted by the `state` field. A state of **0** means the joint either does not exist or is outside of the image's bounds, **1** denotes a joint that is inside of the image but cannot be seen because the part of the object it belongs to is not visible in the image, and **2** means the joint was present and visible.
You may also note that the `pose` field has a value of `unset`. This is because we have not defined poses for our animation clip and `Perception Camera` yet. We will do this next.
| Affect Simulation Timing | Have this camera affect simulation timings (similar to a scheduled camera) by requesting a specific frame delta time. Enabling this option will let you set the `Simulation Delta Time` property described above.|
## Output Resolution
When using Unity Editor to generate datasets, the resolution of the images generated by the Perception Camera will match the resolution set for the ***Game*** view of the editor. However, images generated with built players (including local builds and Unity Simulation runs) will use the resolution specified in project settings.
## Camera labelers
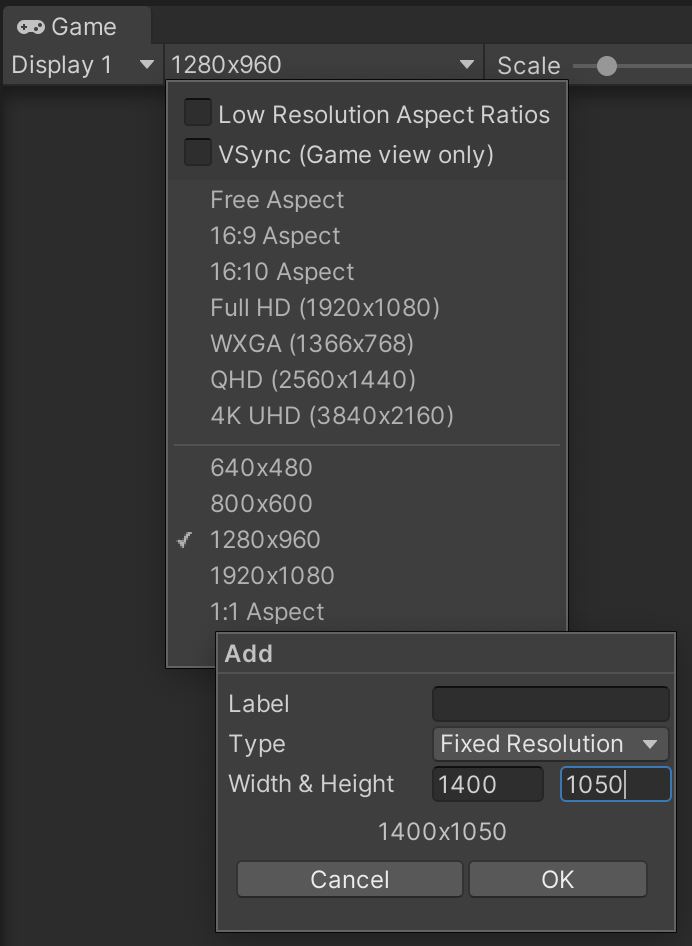
* To set the resolution of the ***Game*** view, click on the dropdown menu in front of `Display 1`. You can use one of the provided resolutions or create a new one. To create one, click **+**. Set `Type` to `Fixed Resolution` and `Width` and `Height` to your desired resolution.
<palign="center">
<imgsrc="images/gameview_res.png"width="300"/>
<br><i>Creating a new resolution preset for the ***Game*** view</i>
</p>
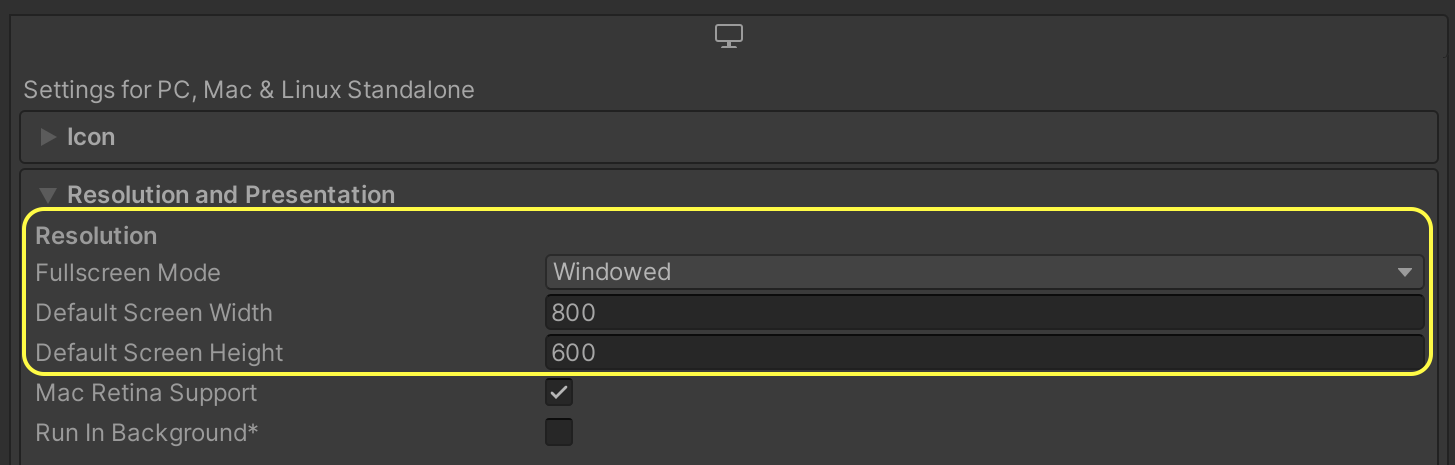
* To set the resolution of the built player, Open ***Edit -> Project Settings*** and navigate to the ***Player*** tab. In the ***Resolution and Presentation*** section, set ***Fullscreen Mode*** to ***Windowed*** and then set ***Default Screen Width*** and ***Default Screen Height*** to your desired resolution.
<palign="center">
<imgsrc="images/build_res.png"width="700"/>
<br><i>Setting the resolution of the built player</i>
</p>
## Camera Labelers
Camera labelers capture data related to the Camera in the JSON dataset. You can use this data to train models and for dataset statistics. The Perception package provides several Camera labelers, and you can derive from the CameraLabeler class to define more labelers.
### Semantic Segmentation Labeler
The BoundingBox2DLabeler produces 2D bounding boxes for each visible object with a label you define in the IdLabelConfig. Unity calculates bounding boxes using the rendered image, so it only excludes occluded or out-of-frame portions of the objects.
### Bounding Box 3D Ground Truth Labeler
### Bounding Box 3D Labeler
The Bounding Box 3D Ground Truth Labeler produces 3D ground truth bounding boxes for each labeled game object in the scene. Unlike the 2D bounding boxes, 3D bounding boxes are calculated from the labeled meshes in the scene and all objects (independent of their occlusion state) are recorded.
```
_Example rendered object info for a single object_
The RenderedObjectInfoLabeler records a list of all objects visible in the Camera image, including its instance ID, resolved label ID and visible pixels. If Unity cannot resolve objects to a label in the IdLabelConfig, it does not record these objects.
### KeypointLabeler
The keypoint labeler captures keypoints of a labeled gameobject. The typical use of this labeler is capturing human pose estimation data. The labeler uses a [keypoint template](#KeypointTemplate) which defines the keypoints to capture for the model and the skeletal connections between those keypoints. The positions of the keypoints are recorded in pixel coordinates. Each keypoint has a state value: 0 - the keypoint either does not exist or is outside of the image's bounds, 1 - the keypoint exists and is inside of the image's bounds but cannot be seen because it is occluded by another object, and 2 - the keypoint exists and is visible.
```
keypoints {
label_id: <int> -- Integer identifier of the label
instance_id: <str> -- UUID of the instance.
template_guid: <str> -- UUID of the keypoint template
pose: <str> -- Pose ground truth information
keypoints [ -- Array of keypoint data, one entry for each keypoint defined in associated template file.
{
index: <int> -- Index of keypoint in template
x: <float> -- X pixel coordinate of keypoint
y: <float> -- Y pixel coordinate of keypoint
state: <int> -- 0: keypoint does not exist, 1: keypoint exists but is not visible, 2: keypoint exists and is visible
}, ...
]
}
```
#### Keypoint Template
keypoint templates are used to define the keypoints and skeletal connections captured by the KeypointLabeler. The keypoint
template takes advantage of Unity's humanoid animation rig, and allows the user to automatically associate template keypoints
to animation rig joints. Additionally, the user can choose to ignore the rigged points, or add points not defined in the rig.
A Coco keypoint template is included in the perception package.
The `RenderedObjectInfoLabeler` records a list of all objects visible in the camera image, including their instance IDs, resolved label IDs, and visible pixel counts. If Unity cannot resolve objects to a label in the `IdLabelConfig`, it does not record these objects.
##### Editor
### Keypoint Labeler
The keypoint template editor allows the user to create/modify a keypoint template. The editor consists of the header information,
the keypoint array, and the skeleton array.
The keypoint labeler captures the screen locations of specific points on labeled GameObjects. The typical use of this Labeler is capturing human pose estimation data, but it can be used to capture points on any kind of object. The Labeler uses a [Keypoint Template](#KeypointTemplate) which defines the keypoints to capture for the model and the skeletal connections between those keypoints. The positions of the keypoints are recorded in pixel coordinates.

<br/>_Header section of the keypoint template_
In the header section, a user can change the name of the template and supply textures that they would like to use for the keypoint
visualization.

<br/>_Keypoint section of the keypoint template_
The keypoint section allows the user to create/edit keypoints and associate them with Unity animation rig points. Each keypoint record
has 4 fields: label (the name of the keypoint), Associate to Rig (a boolean value which, if true, automatically maps the keypoint to
the gameobject defined by the rig), Rig Label (only needed if Associate To Rig is true, defines which rig component to associate with
the keypoint), and Color (RGB color value of the keypoint in the visualization).

<br/>_Skeleton section of the keypoint template_
The skeleton section allows the user to create connections between joints, basically defining the skeleton of a labeled object.
##### Format
```
annotation_definition.spec {
template_id: <str> -- The UUID of the template
template_name: <str> -- Human readable name of the template
key_points [ -- Array of joints defined in this template
{
label: <str> -- The label of the joint
index: <int> -- The index of the joint
}, ...
]
skeleton [ -- Array of skeletal connections (which joints have connections between one another) defined in this template
{
joint1: <int> -- The first joint of the connection
joint2: <int> -- The second joint of the connection
}, ...
]
}
```
#### Animation Pose Label
This file is used to define timestamps in an animation to a pose label.
For more information, see [Keypoint Labeler](GroundTruth/KeypointLabeler.md) or the [Human Pose Labeling and Randomization Tutorial](HPTutorial/TUTORIAL.md)
As seen in the UI for `Perception Camera`, the list of `Camera Labelers` is currently empty. For each type of ground-truth you wish to generate along-side your captured frames (e.g. 2D bounding boxes around objects), you will need to add a corresponding `Camera Labeler` to this list.
To speed-up your workflow, the Perception package comes with five common labelers for object-detection tasks; however, if you are comfortable with code, you can also add your own custom labelers. The labelers that come with the Perception package cover **3D bounding boxes, 2D bounding boxes, object counts, object information (pixel counts and ids), and semantic segmentation images (each object rendered in a unique colour)**. We will use four of these in this tutorial.
To speed-up your workflow, the Perception package comes with seven common Labelers for object-detection and human keypoint labeling tasks; however, if you are comfortable with code, you can also add your own custom Labelers. The Labelers that come with the Perception package cover **keypoint labeling, 3D bounding boxes, 2D bounding boxes, object counts, object information (pixel counts and ids), instance segmentation, and semantic segmentation**. We will use four of these in this tutorial.
Once you add the labelers, the _**Inspector**_ view of the `Perception Camera` component will look like this:
Once you add the Labelers, the _**Inspector**_ view of the `Perception Camera` component will look like this:
One of the useful features that comes with the `Perception Camera` component is the ability to display real-time visualizations of the labelers when your simulation is running. For instance, `BoundingBox2DLabeler` can display two-dimensional bounding boxes around the foreground objects that it tracks in real-time and `SemanticSegmentationLabeler` displays the semantic segmentation image overlaid on top of the camera's view. To enable this feature, make sure the `Show Labeler Visualizations` checkmark is enabled.
One of the useful features that comes with the `Perception Camera` component is the ability to display real-time visualizations of the Labelers when your simulation is running. For instance, `BoundingBox2DLabeler` can display two-dimensional bounding boxes around the foreground objects that it tracks in real-time and `SemanticSegmentationLabeler` displays the semantic segmentation image overlaid on top of the camera's view. To enable this feature, make sure the `Show Labeler Visualizations` checkmark is enabled.
It is now time to tell each labeler added to the `Perception Camera` which objects it should label in the generated dataset. For instance, if your workflow is intended for generating frames and ground-truth for detecting chairs, your labelers would need to know that they should look for objects labeled "chair" within the scene. The chairs should in turn also be labeled "chair" in order to make them visible to the labelers. We will now learn how to set up these configurations.
It is now time to tell each Labeler added to the `Perception Camera` which objects it should label in the generated dataset. For instance, if your workflow is intended for generating frames and ground-truth for detecting chairs, your Labelers would need to know that they should look for objects labeled "chair" within the scene. The chairs should in turn also be labeled "chair" in order to make them visible to the Labelers. We will now learn how to set up these configurations.
You will notice each added labeler has a `Label Config` field. By adding a label configuration here you can instruct the labeler to look for certain labels within the scene and ignore the rest. To do that, we should first create label configurations.
You will notice each added Labeler has a `Label Config` field. By adding a label configuration here you can instruct the Labeler to look for certain labels within the scene and ignore the rest. To do that, we should first create label configurations.
* **:green_circle: Action**: In the _**Project**_ tab, right-click the `Assets` folder, then click _**Create -> Perception -> Id Label Config**_.
* **:green_circle: Action**: In the _**Project**_ tab, right-click the `Assets` folder, then click _**Create -> Perception -> Semantic Segmentation Label Config**_. Name this asset `TutorialSemanticSegmentationLabelConfig`.
Now that you have created your label configurations, we need to assign them to labelers that you previously added to your `Perception Camera` component.
Now that you have created your label configurations, we need to assign them to Labelers that you previously added to your `Perception Camera` component.
* **:green_circle: Action**: Select the `Main Camera` object from the Scene _**Hierarchy**_, and in the _**Inspector**_ tab, assign the newly created `TutorialIdLabelConfig` to the first three labelers. To do so, you can either drag and drop the former into the corresponding fields for each labeler, or click on the small circular button in front of the `Id Label Config` field, which brings up an asset selection window filtered to only show compatible assets. Assign `TutorialSemanticSegmentationLabelConfig` to the fourth labeler. The `Perception Camera` component will now look like the image below:
* **:green_circle: Action**: Select the `Main Camera` object from the Scene _**Hierarchy**_, and in the _**Inspector**_ tab, assign the newly created `TutorialIdLabelConfig` to the first three Labelers. To do so, you can either drag and drop the former into the corresponding fields for each Labeler, or click on the small circular button in front of the `Id Label Config` field, which brings up an asset selection window filtered to only show compatible assets. Assign `TutorialSemanticSegmentationLabelConfig` to the fourth Labeler. The `Perception Camera` component will now look like the image below:
The Prefab contains a number of components, including a `Transform`, a `Mesh Filter`, a `Mesh Renderer` and a `Labeling` component (highlighted in the image above). While the first three of these are common Unity components, the fourth one is specific to the Perception package, and is used for assigning labels to objects. You can see here that the Prefab has one label already added, displayed in the list of `Added Labels`. The UI here provides a multitude of ways for you to assign labels to the object. You can either choose to have the asset automatically labeled (by enabling `Use Automatic Labeling`), or add labels manually. In case of automatic labeling, you can choose from a number of labeling schemes, e.g. the asset's name or folder name. If you go the manual route, you can type in labels, add labels from any of the label configurations included in the project, or add from lists of suggested labels based on the Prefab's name and path.
Note that each object can have multiple labels assigned, and thus appear as different objects to labelers with different label configurations. For instance, you may want your semantic segmentation labeler to detect all cream cartons as `dairy_product`, while your bounding box labeler still distinguishes between different types of dairy product. To achieve this, you can add a `dairy_product` label to all your dairy products, and then in your label configuration for semantic segmentation, only add the `dairy_product` label, and not any specific products or brand names.
Note that each object can have multiple labels assigned, and thus appear as different objects to Labelers with different label configurations. For instance, you may want your semantic segmentation Labeler to detect all cream cartons as `dairy_product`, while your bounding box Labeler still distinguishes between different types of dairy product. To achieve this, you can add a `dairy_product` label to all your dairy products, and then in your label configuration for semantic segmentation, only add the `dairy_product` label, and not any specific products or brand names.
For this tutorial, we have already prepared the foreground Prefabs for you and added the `Labeling` component to all of them. These Prefabs were based on 3D scans of the actual grocery items. If you are making your own Prefabs, you can easily add a `Labeling` component to them using the _**Add Component**_ button visible in the bottom right corner of the screenshot above.
<imgsrc="Images/labelconfigs.png"width="800"/>
</p>
> :information_source: Since we used automatic labels here and added them to our configurations, we are confident that the labels in the configurations match the labels of our objects. In cases where you decide to add manual labels to objects and configurations, make sure you use the exact same labels, otherwise, the objects for which a matching label is not found in your configurations will not be detected by the labelers that are using those configurations.
> :information_source: Since we used automatic labels here and added them to our configurations, we are confident that the labels in the configurations match the labels of our objects. In cases where you decide to add manual labels to objects and configurations, make sure you use the exact same labels, otherwise, the objects for which a matching label is not found in your configurations will not be detected by the Labelers that are using those configurations.
Now that we have labelled all our foreground objects and setup our label configurations, let's briefly test things.
<imgsrc="Images/first_run.png"width ="700"/>
</p>
In this view, you will also see the real-time visualizations we discussed before shown on top of the camera's view. In the top right corner of the window, you can see a visualization control panel, through which you can enable or disable visualizations for individual labelers. That said, we currently have no foreground objects in the Scene yet, so no bounding boxes or semantic segmentation overlays will be displayed.
In this view, you will also see the real-time visualizations we discussed before shown on top of the camera's view. In the top right corner of the window, you can see a visualization control panel, through which you can enable or disable visualizations for individual Labelers. That said, we currently have no foreground objects in the Scene yet, so no bounding boxes or semantic segmentation overlays will be displayed.
Note that disabling visualizations for a labeler does not affect your generated data. The annotations from all labelers that are active before running the simulation will continue to be recorded and will appear in the output data.
Note that disabling visualizations for a Labeler does not affect your generated data. The annotations from all Labelers that are active before running the simulation will continue to be recorded and will appear in the output data.
To generate data as fast as possible, the simulation utilizes asynchronous processing to churn through frames quickly, rearranging and randomizing the objects in each frame. To be able to check out individual frames and inspect the real-time visualizations, click on the pause button (next to play). You can also switch back to the Scene view to be able to inspect each object individually. For performance reasons, it is recommended to disable visualizations altogether (from the _**Inspector**_ view of `Perception Camera`) once you are ready to generate a large dataset.
- RGB images (raw camera output) (if the `Save Camera Output to Disk` check mark is enabled on `Perception Camera`)
- Semantic segmentation images (if the `SemanticSegmentationLabeler` is added and active on `Perception Camera`)
The output dataset includes a variety of information about different aspects of the active sensors in the Scene (currently only one), as well as the ground-truth generated by all active labelers. [This page](https://github.com/Unity-Technologies/com.unity.perception/blob/master/com.unity.perception/Documentation%7E/Schema/Synthetic_Dataset_Schema.md) provides a comprehensive explanation on the schema of this dataset. We strongly recommend having a look at the page once you have completed this tutorial.
The output dataset includes a variety of information about different aspects of the active sensors in the Scene (currently only one), as well as the ground-truth generated by all active Labelers. [This page](https://github.com/Unity-Technologies/com.unity.perception/blob/master/com.unity.perception/Documentation%7E/Schema/Synthetic_Dataset_Schema.md) provides a comprehensive explanation on the schema of this dataset. We strongly recommend having a look at the page once you have completed this tutorial.
* `label_id`: The numerical id assigned to this object's label in the labeler's label configuration
* `label_id`: The numerical id assigned to this object's label in the Labeler's label configuration
* `label_name`: The object's label, e.g. `candy_minipralines_lindt`
* `instance_id`: Unique instance id of the object
* `x` and `y`: Pixel coordinates of the top-left corner of the object's bounding box (measured from the top-left corner of the image)
The process of running a project on Unity Simulation involves building it for Linux and then uploading this build, along with a set of parameters, to Unity Simulation. The Perception package simplifies this process by including a dedicated _**Run in Unity Simulation**_ window that accepts a small number of required parameters and handles everything else automatically.
For performance reasons, it is best to disable real-time visualizations before carrying on with the Unity Simulation run.
* **:green_circle: Action**: From the _**Inspector**_ view of `Perception Camera`, disable real-time visualizations.
In order to make sure our builds are compatible with Unity Simulation, we need to set our project's scripting backend to _**Mono**_ rather than _**IL2CPP**_ (if not already set). We will also need to switch to _**Windowed**_ mode.
<imgsrc="Images/runinusim.png"width="600"/>
</p>
Here, you can also specify a name for the run, the number of Iterations the Scenario will execute for, and the number of _**Instances**_ (number of nodes the work will be distributed across) for the run. This window automatically picks the currently active Scene and Scenario to run in Unity Simulation.
Here, you can specify a name for the run, the number of Iterations the Scenario will execute for, and the number of Instances (number of nodes the work will be distributed across) for the run. This window automatically picks the currently active Scene and Scenario to run in Unity Simulation.
* **:green_circle: Action**: Name your run `FirstRun`, set the number of Iterations to `1000`, and Instances to `20`.
* **:green_circle: Action**: Click _**Build and Run**_.
Your project will now be built and then uploaded to Unity Simulation and run. This may take a few minutes to complete, during which the editor may become frozen; this is normal behaviour.
* **:green_circle: Action**: Once the operation is complete, you can find the **Execution ID** of this Unity Simulation run in the **Console** tab and the ***Run in Unity Simulation** Window:
* **:green_circle: Action**: Once the operation is complete, you can find the **Execution ID** of this Unity Simulation run in the **Console** tab and the ***Run in Unity Simulation*** Window:
Here is an example output of this command, indicating that there is only one node, and that the node is still in progress:
Here is an example output of this command, indicating that there are 20 nodes, and that they are all still in progress:
In Progress 1
In Progress 20
At this point, we will need to wait until the execution is complete. Check your run with the above command periodically until you see a 1 for `Successes` and 0 for `In Progress`.
At this point, we will need to wait until the execution is complete. Check your run with the above command periodically until you see a 20 for `Successes` and 0 for `In Progress`.
Given the relatively small size of our Scenario (1,000 Iterations), this should take less than 5 minutes.
* **:green_circle: Action**: Use the `usim summarize run-execution <execution-id>` command periodically to check the progress of your run.
The manifest is a `.csv` formatted file and will be downloaded to the same location from which you execute the above command, which is the `unity_simulation_bundle` folder.
This file does **not**** include actual data, rather, it includes links to the generated data, including the JSON files, the logs, the images, and so on.
This file does **not** include actual data, rather, it includes links to the generated data, including the JSON files, the logs, the images, and so on.
* **:green_circle: Action**: Open the manifest file to check it. Make sure there are links to various types of output and check a few of the links to see if they work.
EditorGUILayout.PropertyField(serializedObject.FindProperty(nameof(perceptionCamera.simulationDeltaTime)),newGUIContent(k_FrametimeTitle,$"Sets Unity's Time.{nameof(Time.captureDeltaTime)} to the specified number, causing a fixed number of frames to be simulated for each second of elapsed simulation time regardless of the capabilities of the underlying hardware. Thus, simulation time and real time will not be synchronized."));
EditorGUILayout.PropertyField(serializedObject.FindProperty(nameof(perceptionCamera.simulationDeltaTime)),newGUIContent(k_FrametimeTitle,$"Sets Unity's Time.{nameof(Time.captureDeltaTime)} to the specified number, causing a fixed number of frames to be simulated for each second of elapsed simulation time regardless of the capabilities of the underlying hardware. Thus, simulation time and real time will not be synchronized. Note that large {k_FrametimeTitle} values will lead to lower performance as the engine will need to simulate longer periods of elapsed time for each rendered frame."));
/// The Z offset component applied to all generated background layers
/// </summary>
[Tooltip("The Z offset applied to positions of all placed objects.")]
[Tooltip("The number of background layers to generate.")]
[Tooltip("The minimum distance between the centers of the placed objects.")]
[Tooltip("The width and height of the area in which objects will be placed. These should be positive numbers and sufficiently large in relation with the Separation Distance specified.")]
[Tooltip("The list of Prefabs to be placed by this Randomizer.")]
/// The Z offset component applied to the generated layer of GameObjects
/// </summary>
[Tooltip("The Z offset applied to positions of all placed objects.")]
[Tooltip("The minimum distance between the centers of the placed objects.")]
[Tooltip("The width and height of the area in which objects will be placed. These should be positive numbers and sufficiently large in relation with the Separation Distance specified.")]
[Tooltip("The list of Prefabs to be placed by this Randomizer.")]
EditorGUILayout.HelpBox("No Labeling component detected on parents. Keypoint labeling requires a Labeling component on the root of the object.",MessageType.Info);
The Keypoint Labeler captures the screen locations of specific points on labeled GameObjects. The typical use of this Labeler is capturing human pose estimation data, but it can be used to capture points on any kind of object. The Labeler uses a [Keypoint Template](#KeypointTemplate) which defines the keypoints to capture for the model and the skeletal connections between those keypoints. The positions of the keypoints are recorded in pixel coordinates.
## Data Format
The keypoints captured each frame are in the following format:
```
keypoints {
label_id: <int> -- Integer identifier of the label
instance_id: <str> -- UUID of the instance.
template_guid: <str> -- UUID of the keypoint template
pose: <str> -- Current pose
keypoints [ -- Array of keypoint data, one entry for each keypoint defined in associated template file.
{
index: <int> -- Index of keypoint in template
x: <float> -- X pixel coordinate of keypoint
y: <float> -- Y pixel coordinate of keypoint
state: <int> -- Visibility state
}, ...
]
}
```
The `state` entry has three possible values:
* 0 - the keypoint either does not exist or is outside of the image's bounds
* 1 - the keypoint exists inside of the image bounds but cannot be seen because the object is not visible at its location in the image
* 2 - the keypoint exists and the object is visible at its location
The annotation definition, captured by the Keypoint Labeler once in each dataset, describes points being captured and their skeletal connections. These are defined by the [Keypoint Template](#KeypointTemplate).
```
annotation_definition.spec {
template_id: <str> -- The UUID of the template
template_name: <str> -- Human readable name of the template
key_points [ -- Array of joints defined in this template
{
label: <str> -- The label of the joint
index: <int> -- The index of the joint
}, ...
]
skeleton [ -- Array of skeletal connections (which joints have connections between one another) defined in this template
{
joint1: <int> -- The first joint of the connection
joint2: <int> -- The second joint of the connection
}, ...
]
}
```
## Setup
The Keypoint Labeler captures keypoints each frame from each object in the scene that meets the following conditions:
* The object or its children are at least partially visible in the frame
* The _Object Filter_ option on the Keypoint Labeler can be used to also include fully occluded or off-screen objects
* The root object has a `Labeling` component
* The object matches at least one entry in the Keypoint Template by either:
* Containing an Animator with a [humanoid avatar](https://docs.unity3d.com/Manual/ConfiguringtheAvatar.html) whose rig matches a keypoint OR
* Containing children with Joint Label components whose labels match keypoints
For a tutorial on setting up your project for keypoint labeling, see the [Human Pose Labeling and Randomization Tutorial](../HPTutorial/TUTORIAL.md).
## Keypoint Template
Keypoint Templates are used to define the keypoints and skeletal connections captured by the Keypoint Labeler. The Keypoint Template takes advantage of Unity's humanoid animation rig, and allows the user to automatically associate template keypoints to animation rig joints. Additionally, the user can choose to ignore the rigged points, or add points not defined in the rig.
A [COCO](https://cocodataset.org/#home) Keypoint Template is included in the Perception package.
### Editor
The Keypoint Template editor allows the user to create/modify a Keypoint Template. The editor consists of the header information, the keypoint array, and the skeleton array.

<br/>_Header section of the keypoint template_
In the header section, a user can change the name of the template and supply textures that they would like to use for the keypoint visualization.

<br/>_Keypoint section of the keypoint template_
The keypoint section allows the user to create/edit keypoints and associate them with Unity animation rig points. Each keypoint record
has 4 fields: label (the name of the keypoint), Associate to Rig (a boolean value which, if true, automatically maps the keypoint to
the GameObject defined by the rig), Rig Label (only needed if Associate To Rig is true, defines which rig component to associate with
the keypoint), and Color (RGB color value of the keypoint in the visualization).

<br/>_Skeleton section of the keypoint template_
The skeleton section allows the user to create connections between joints, basically defining the skeleton of a labeled object.
#### Animation Pose Label
This file is used to define timestamps in an animation to a pose label.
{kind=link}
{kind=link}
{kind=link}

{kind=link}