|
|
|
|
|
|
|
TODO |
|
|
|
# Getting Started with SynthDet |
|
|
|
This will provide a step by step instructions on creating a new scene using the Perception features to create semantic data and image captures. |
|
|
|
|
|
|
|
## Step 1: Create a new scene and camera |
|
|
|
1. Create a new scene File-> New Scene |
|
|
|
2. Save the Scene File-> Save and give it a name, i.e created scene name is PerceptionScene |
|
|
|
3. Select the Main Camera and reset the Position transform to 0 |
|
|
|
4. In the Hierarchy window select the main camera |
|
|
|
1. In the inspector panel of the main camera select Add Component |
|
|
|
2. Add a script called Perception Camera |
|
|
|
5. Fill out the Description field in the script |
|
|
|
1. i.e example description is Perception Sample |
|
|
|
|
|
|
|
## Step 2: Create labeled objects |
|
|
|
1. In the Hierarchy window right click -> Go to 3D Object -> Select Cube |
|
|
|
2. Select the cube |
|
|
|
1. Adjust the position transform of the cube to 1, 0, 5 (X,Y,Z) |
|
|
|
2. Adjust the rotation of the cube to 0, 45, 0 (X,Y,Z) |
|
|
|
3. In the Hierarchy window right click -> Go to 3D Object -> Select Cube |
|
|
|
4. Change the name of the cube to Box in the Inspector panel |
|
|
|
1. Adjust the position transform of the cube to -1, 0, 5 (X,Y,Z) |
|
|
|
2. Adjust the rotation of the cube to 0, 45, 0 (X,Y,Z) |
|
|
|
4. In the Hierarchy window right click -> Go to 3D Object -> Select Cube |
|
|
|
5. Change the name of the cube to Crate in the Inspector panel |
|
|
|
1. Adjust the position transform of the cube to 0, 0, 6.5 (X,Y,Z) |
|
|
|
2. Adjust the rotation of the cube to 0, 45, 0 (X,Y,Z) |
|
|
|
<img src="docs/images/CompletedScene.PNG" align="middle"/> |
|
|
|
6. For each object in the scene that was created, from the inspector panel add the script called Labeling |
|
|
|
1. Click the **+** |
|
|
|
2. In the text field add the name of the object i.e Crate |
|
|
|
<img src="docs/images/LabeledObject.PNG" align="middle"/> |
|
|
|
7. In the Project panel right click -> Perception -> Labeling Configuration |
|
|
|
8. Select the Labeling Configuration created in the project panel |
|
|
|
1. Click the **+** |
|
|
|
2. In the label text field add the same text that the Label script contains on the object |
|
|
|
3. Add a numerical value to the value field |
|
|
|
1. Make sure the labels all have different values, for this example use values of 10,000 |
|
|
|
<img src="docs/images/LabelingConfigurationFinished.PNG" align="middle"/> |
|
|
|
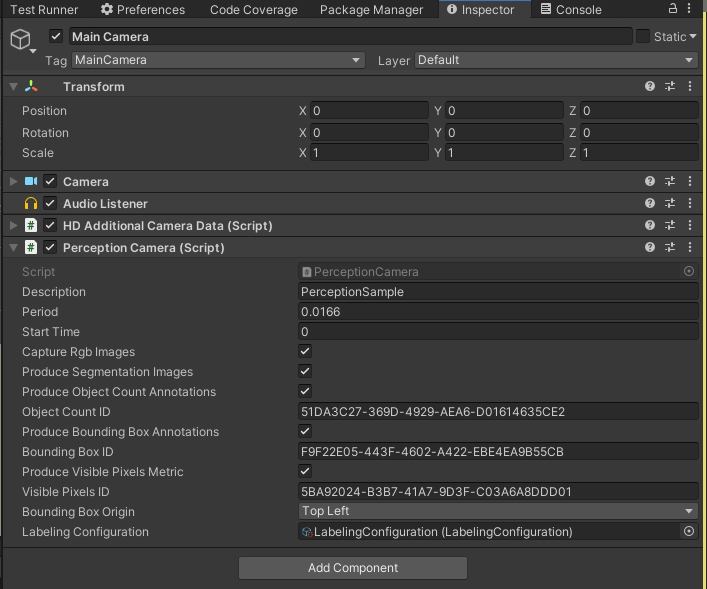
9. Select the Main Camera in the Hierarchy panel |
|
|
|
1. In the Perception Camera script in the Labeling Configuration field add the Labeling Configuration script created in previous step |
|
|
|
<img src="docs/images/MainCameraConfig.PNG" align="middle"/> |
|
|
|
|
|
|
|
## Step 3: Checking local files |
|
|
|
1. Press play in the editor and allow the scene to run for 10 seconds before ending playmode |
|
|
|
2. In the console log you will see a Shutdown in Progress message that will show a file path to the location of the created data from the labeling objects |
|
|
|
3. The file path is the Application Persistent Path + /Defaultcompany/UnityTestFramework/<Hash Key> |
|
|
|
1. Example file path on a Windows PC : *C:/Users/<User Name>/AppData/LocalLow/DefaultCompany/UnityTestFramework\2e10ec21-9d97-4cee-b5a2-7e95e299afa4\RGB18f61842-ef8d-4b31-acb5-cb1da36fb7b1* |
|
|
|
4. In the output path for the Labeling content you can verify the following data is present: |
|
|
|
1. RGB capture |
|
|
|
2. Semantic Segmentation |
|
|
|
3. Logs |
|
|
|
4. Dataset |
|
|
|
<img src="docs/images/rgb_2.png" align="middle"/> |
|
|
|
<img src="docs/images/segmentation_2.png" align="middle"/> |
{kind=link}

{kind=link}

{kind=link}

{kind=link}
{kind=link}
{kind=link}