9.4 KiB
The Perception Camera Component
The Perception Camera component ensures that the Camera runs at deterministic rates. It also ensures that the Camera uses DatasetCapture to capture RGB and other Camera-related ground truth in the JSON dataset. You can use the Perception Camera component on the High Definition Render Pipeline (HDRP) or the Universal Render Pipeline (URP).

The Inspector view of the Perception Camera component
Properties
| Property: | Function: |
|---|---|
| Description | A description of the Camera to be registered in the JSON dataset. |
| Show Visualizations | Display realtime visualizations for labelers that are currently active on this camera. |
| Capture RGB Images | When you enable this property, Unity captures RGB images as PNG files in the dataset each frame. |
| Capture Trigger Mode | The method of triggering captures for this camera. In Scheduled mode, captures happen automatically based on a start frame and frame delta time. In Manual mode, captures should be triggered manually through calling the RequestCapture method of PerceptionCamera. |
| Camera Labelers | A list of labelers that generate data derived from this Camera. |
Properties for Scheduled Capture Mode
| Property: | Function: |
|---|---|
| Simulation Delta Time | The simulation frame time (seconds) for this camera. E.g. 0.0166 translates to 60 frames per second. This will be used as Unity's Time.captureDeltaTime, causing a fixed number of frames to be generated for each second of elapsed simulation time regardless of the capabilities of the underlying hardware. For more information on sensor scheduling, see DatasetCapture. |
| First Capture Frame | Frame number at which this camera starts capturing. |
| Frames Between Captures | The number of frames to simulate and render between the camera's scheduled captures. Setting this to 0 makes the camera capture every frame. |
Properties for Manual Capture Mode
| Property: | Function: |
|---|---|
| Affect Simulation Timing | Have this camera affect simulation timings (similar to a scheduled camera) by requesting a specific frame delta time. Enabling this option will let you set the Simulation Delta Time property described above. |
Camera labelers
Camera labelers capture data related to the Camera in the JSON dataset. You can use this data to train models and for dataset statistics. The Perception package provides several Camera labelers, and you can derive from the CameraLabeler class to define more labelers.
Semantic Segmentation Labeler

Example semantic segmentation image from a modified SynthDet project
The SemanticSegmentationLabeler generates a 2D RGB image with the attached Camera. Unity draws objects in the color you associate with the label in the SemanticSegmentationLabelingConfiguration. If Unity can't find a label for an object, it draws it in black.
Instance Segmentation Labeler
The instance segmentation labeler generates a 2D RGB image with the attached camera. Unity draws each instance of a labeled object with a unique color.
Bounding Box 2D Labeler

Example bounding box visualization from SynthDet generated by the SynthDet_Statistics Jupyter notebook
The BoundingBox2DLabeler produces 2D bounding boxes for each visible object with a label you define in the IdLabelConfig. Unity calculates bounding boxes using the rendered image, so it only excludes occluded or out-of-frame portions of the objects.
Bounding Box 3D Ground Truth Labeler
The Bounding Box 3D Ground Truth Labeler produces 3D ground truth bounding boxes for each labeled game object in the scene. Unlike the 2D bounding boxes, 3D bounding boxes are calculated from the labeled meshes in the scene and all objects (independent of their occlusion state) are recorded.
Object Count Labeler
{
"label_id": 25,
"label_name": "drink_whippingcream_lucerne",
"count": 1
}
Example object count for a single label
The ObjectCountLabeler records object counts for each label you define in the IdLabelConfig. Unity only records objects that have at least one visible pixel in the Camera frame.
Rendered Object Info Labeler
{
"label_id": 24,
"instance_id": 320,
"visible_pixels": 28957
}
Example rendered object info for a single object
The RenderedObjectInfoLabeler records a list of all objects visible in the Camera image, including its instance ID, resolved label ID and visible pixels. If Unity cannot resolve objects to a label in the IdLabelConfig, it does not record these objects.
KeypointLabeler
The keypoint labeler captures keypoints of a labeled gameobject. The typical use of this labeler is capturing human pose estimation data. The labeler uses a keypoint template which defines the keypoints to capture for the model and the skeletal connections between those keypoints. The positions of the keypoints are recorded in pixel coordinates. Each keypoint has a state value: 0 - the keypoint either does not exist or is outside of the image's bounds, 1 - the keypoint exists and is inside of the image's bounds but cannot be seen because it is occluded by another object, and 2 - the keypoint exists and is visible.
keypoints {
label_id: <int> -- Integer identifier of the label
instance_id: <str> -- UUID of the instance.
template_guid: <str> -- UUID of the keypoint template
pose: <str> -- Pose ground truth information
keypoints [ -- Array of keypoint data, one entry for each keypoint defined in associated template file.
{
index: <int> -- Index of keypoint in template
x: <float> -- X pixel coordinate of keypoint
y: <float> -- Y pixel coordinate of keypoint
state: <int> -- 0: keypoint does not exist, 1: keypoint exists but is not visible, 2: keypoint exists and is visible
}, ...
]
}
Keypoint Template
keypoint templates are used to define the keypoints and skeletal connections captured by the KeypointLabeler. The keypoint template takes advantage of Unity's humanoid animation rig, and allows the user to automatically associate template keypoints to animation rig joints. Additionally, the user can choose to ignore the rigged points, or add points not defined in the rig. A Coco keypoint template is included in the perception package.
Editor
The keypoint template editor allows the user to create/modify a keypoint template. The editor consists of the header information, the keypoint array, and the skeleton array.
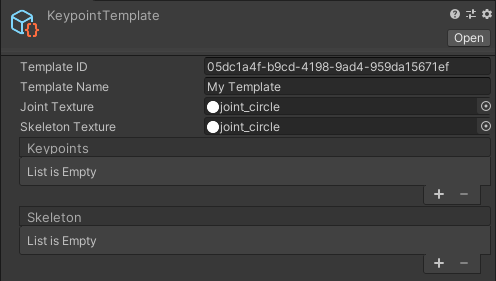
Header section of the keypoint template
In the header section, a user can change the name of the template and supply textures that they would like to use for the keypoint visualization.
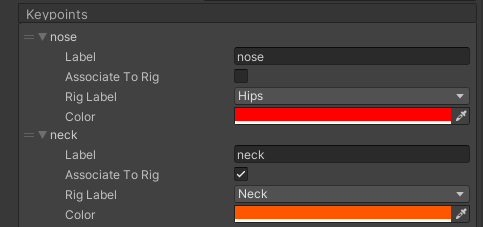
Keypoint section of the keypoint template
The keypoint section allows the user to create/edit keypoints and associate them with Unity animation rig points. Each keypoint record has 4 fields: label (the name of the keypoint), Associate to Rig (a boolean value which, if true, automatically maps the keypoint to the gameobject defined by the rig), Rig Label (only needed if Associate To Rig is true, defines which rig component to associate with the keypoint), and Color (RGB color value of the keypoint in the visualization).
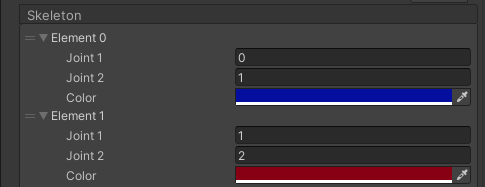
Skeleton section of the keypoint template
The skeleton section allows the user to create connections between joints, basically defining the skeleton of a labeled object.
Format
annotation_definition.spec {
template_id: <str> -- The UUID of the template
template_name: <str> -- Human readable name of the template
key_points [ -- Array of joints defined in this template
{
label: <str> -- The label of the joint
index: <int> -- The index of the joint
}, ...
]
skeleton [ -- Array of skeletal connections (which joints have connections between one another) defined in this template
{
joint1: <int> -- The first joint of the connection
joint2: <int> -- The second joint of the connection
}, ...
]
}
Animation Pose Label
This file is used to define timestamps in an animation to a pose label.
Limitations
Ground truth is not compatible with all rendering features, especially those that modify the visibility or shape of objects in the frame.
When generating ground truth:
- Unity does not run Vertex and geometry shaders
- Unity does not consider transparency and considers all geometry opaque
- Unity does not run post-processing effects, except built-in lens distortion in URP and HDRP
If you discover more incompatibilities, please open an issue in the Perception GitHub repository.