The PoissonDiskSampling utility now samples a larger region of points to then crop to size of the intended region to prevent edge case bias.
Upgraded capture package dependency to 0.0.10-preview.21
Upgraded capture package dependency to 0.0.10-preview.22 to fix an issue with URP where post processing effects were not included when capturing images.
Many labelers require mapping the objects in the view to the values recorded in the dataset. As an example, Semantic Segmentation needs to determine the color to draw each object in the segmentation image.
# Ground Truth Generation
The Perception package includes a set of Labelers which capture ground truth information along with each captured frame. The built-in Labelers support a variety of common computer vision tasks, including 2D and 3D bounding boxes, instance and semantic segmentation, and keypoint labeling (labeled points on 3D objects). The package also includes extensible components for building new Labelers to support additional tasks. Labelers derive ground truth data from labels specified on the GameObjects present in the Scene.
<palign="center">
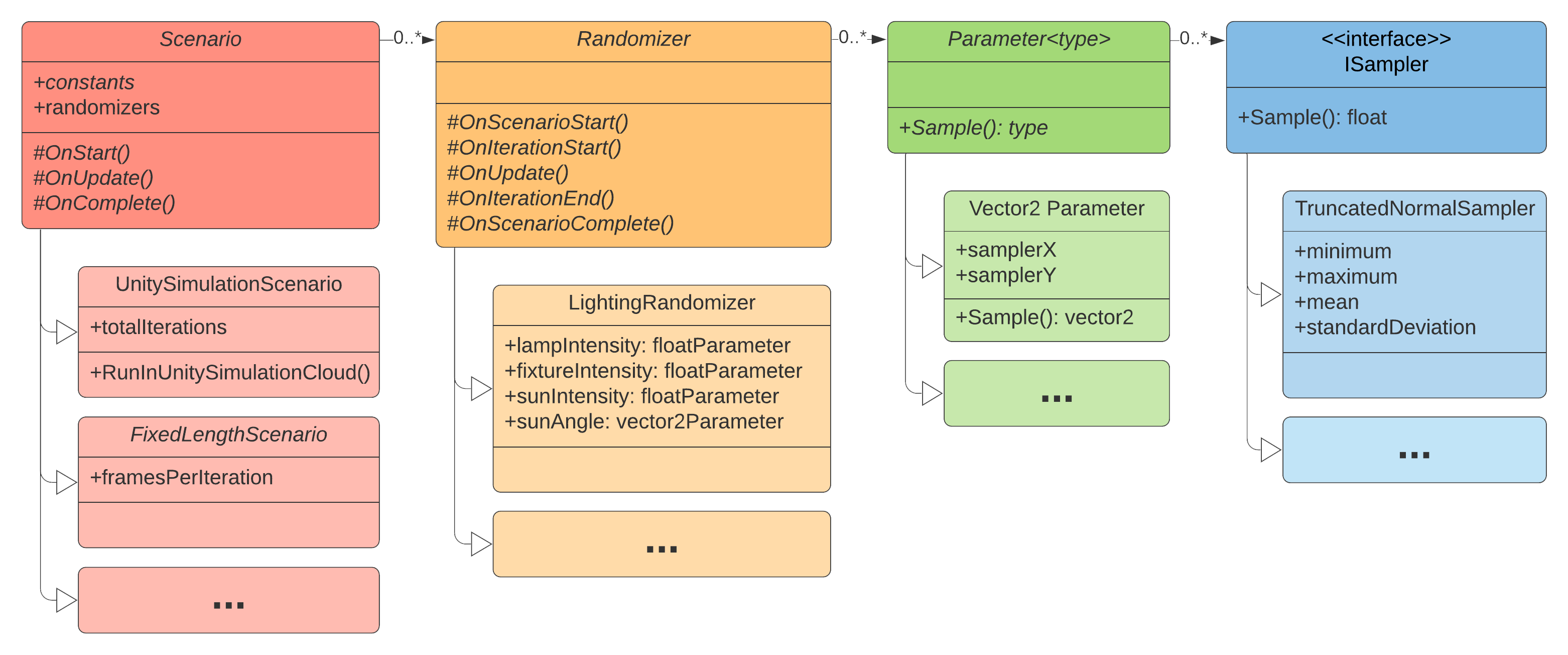
<imgsrc="images/labeling_uml.png"width="800"/>
<br><i>Class diagram for the ground truth generation system of the Perception package</i>
</p>
## Camera Labeler
A set of Camera Labelers are added to the Perception Camera, each tasked with generating a specific type of ground truth. For instance, the Semantic Segmentation Labeler outputs segmentation images in which each labeled object is rendered in a unique user-definable color and non-labeled objects and the background are rendered black.
## Label Config
The Label Config acts as a mapping between string labels and object classes (currently colors or integers), deciding which labels in the Scene (and thus which objects) should be tracked by the Labeler, and what color (or integer id) they should have in the captured frames.
## Labeling Component
The Labeling component associates a list of string-based labels with a GameObject and its descendants. A Labeling component on a descendant overrides its parent's labels.
## Label Resolution
The Labeling component added to the GameObjects in the Scene works in conjunction with each active Labeler's Label Config, in order to map each labeled GameObject to an object class in the output.
## Labeling component
The Labeling component associates a list of string-based labels with a GameObject and its descendants. A Labeling component on a descendant overrides its parent's labels.
### Limitations
## Limitations
## Label Config
Many labelers require a Label Config asset. This asset specifies a list of all labels to be captured in the dataset along with extra information used by the various labelers.
For example, you could label an asset representing a box of Rice Krispies as `food\cereal\kellogs\ricekrispies`
For example, you can assign four different labels to an asset representing a box of Rice Krispies so as to define an inherent hierarchy:
* "food": type
* "cereal": subtype
If the goal of the algorithm is to identify all objects in a Scene that are "food", that label is available and can be used. Conversely if the goal is to identify only Rice Krispies cereal within a Scene that label is also available. Depending on the goal of the algorithm, you can use any mix of labels in the hierarchy.
This way, you can have Label Configs that include labels from different levels of this hierarchy so that you can easily switch an object's label in the output by switching to a different Label Config. If the goal of the algorithm is to identify all objects in a Scene that are "food", that label is available and can be used if the Label Config only contains "food" and not the other labels of the object. Conversely if the goal is to identify only Rice Krispies cereal within a Scene, that label is also available. Depending on the goal of the algorithm, you can use any mix of labels in the hierarchy.
{kind=link}
{kind=link}