16 KiB
Pick-and-Place Tutorial: Part 2
The steps in this tutorial will explain how to configure your ROS workspace for this project, but check out the ROS Wiki's Start Guide if you'd like to learn more about getting started with ROS.
Steps covered in this tutorial include creating a TCP connection between Unity and ROS, generating C# scripts from a ROS message, and publishing and subscribing to a ROS Topic. These steps are adapted from the ROS–Unity Integration Tutorials.
Table of Contents
Part 2: ROS–Unity Integration
Quick Description:
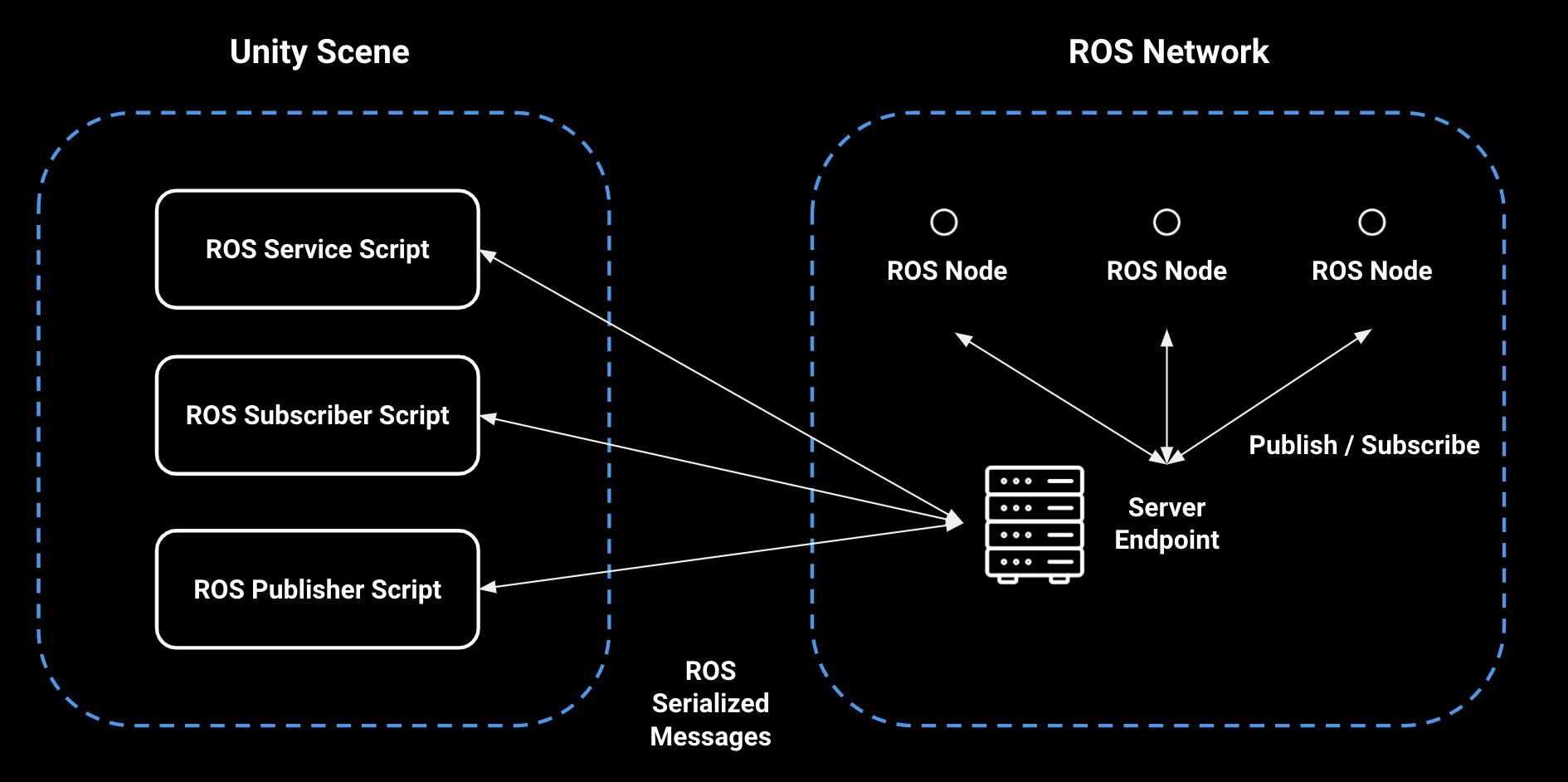
To enable communication between Unity and ROS, a TCP endpoint running as a ROS node handles all message passing. On the Unity side, a ROSConnection component provides the necessary functions to publish, subscribe, or call a service using the TCP endpoint ROS node. The ROS messages being passed between Unity and ROS are expected to be serialized exactly as ROS serializes them internally. This is achieved with the MessageGeneration plugin which generates C# classes, including serialization and deserialization functions, from ROS messages.
The Unity Side
-
If you have not already completed the steps in Part 0 to set up your ROS workspace and Part 1 to set up the Unity project, do so now.
-
If the PickAndPlaceProject Unity project is not already open, select and open it from the Unity Hub.
Note: The Package Manager automatically checked out and built the ROS-TCP-Connection package in this project. You can verify this now by looking for
Packages/ROS-TCP-Connectorin the Project window or by opening the Package Manager window. See the Quick Setup steps for adding this package to your own project.The ROS-TCP-Connector package includes two pieces: TcpConnector, which contains the
ROSConnectionscript described above, and MessageGeneration, which generates C# scripts from ROS msg and srv files.Using this MessageGeneration component, three C# message scripts will be generated. Like their ROS msg counterparts, these scripts define the data values and contents that will be passed between Unity and ROS.
Note: Read more about the ROS msg here.
Note: Read more about the ROS srv here.
-
We will start with generating the MoveItMsg: RobotTrajectory. This file describes the trajectory contents that will be used in the sent and received trajectory messages.
Select
Robotics -> Generate ROS Messages...from the top menu bar.
In the ROS Message Browser window, click
Browsenext to the ROS message path. Navigate to and select the ROS directory of this cloned repository (Unity-Robotics-Hub/tutorials/pick_and_place/ROS/). This window will populate with all msg and srv files found in this directory.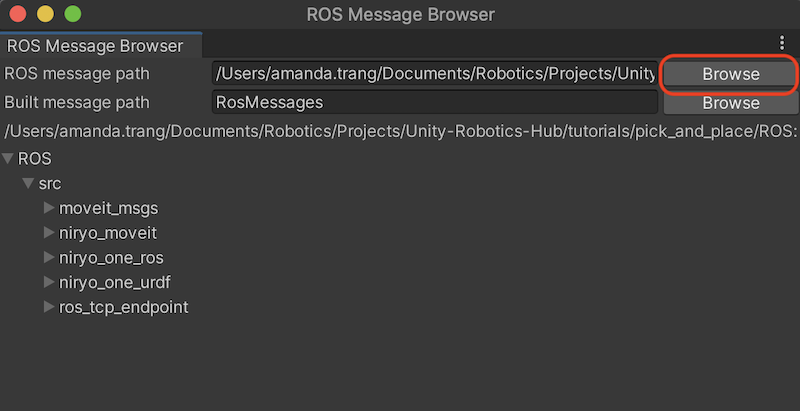
Note: If any of these ROS directories appear to be empty, you can run the command
git submodule update --init --recursiveto download the packages via Git submodules.Under
ROS/src/moveit_msgs/msg, scroll toRobotTrajectory.msg, and click itsBuild msgbutton. The button text will change to "Rebuild msg" when it has finished building.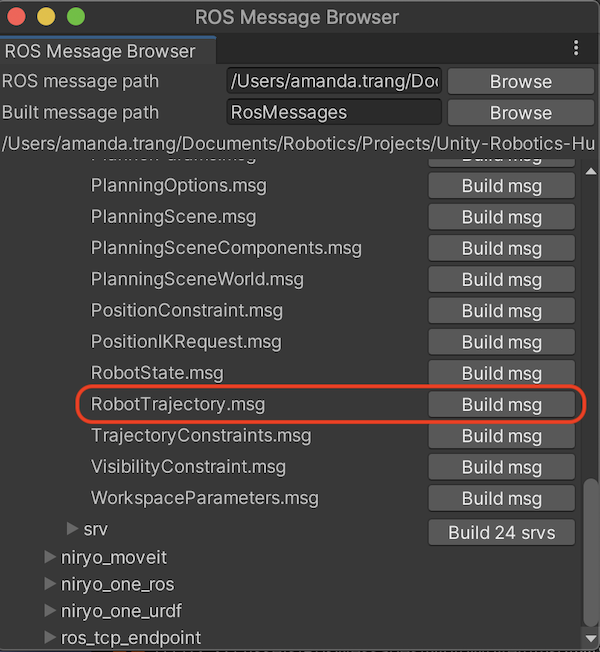
- One new C# script should populate the
Assets/RosMessages/Moveit/msgdirectory: RobotTrajectoryMsg.cs. This name is the same as the message you built, with an "Msg" suffix (for message).
- One new C# script should populate the
-
Next, the custom message scripts for this tutorial will need to be generated.
Still in the ROS Message Browser window, expand
ROS/src/niryo_moveit/msgto view the msg files listed. Next to msg, clickBuild 2 msgs.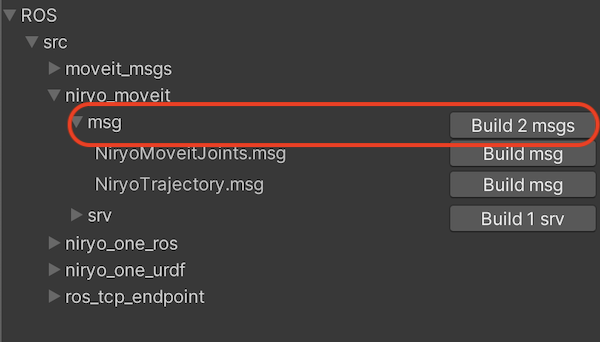
- Two new C# scripts should populate the
Assets/RosMessages/NiryoMoveit/msgdirectory: NiryoMoveitJointsMsg.cs and NiryoTrajectoryMsg.cs. The NiryoMoveitJoints message describes a value for each joint in the Niryo arm as well as poses for the target object and target goal. NiryoTrajectory describes a list of RobotTrajectory values, which will hold the calculated trajectories for the pick-and-place task.
MessageGeneration generates a C# class from a ROS msg file with protections for use of C# reserved keywords and conversion to C# datatypes. Learn more about ROS Messages.
- Two new C# scripts should populate the
-
Finally, now that the messages have been generated, we will create the service for moving the robot.
Still in the ROS Message Browser window, expand
ROS/src/niryo_moveit/srvto view the srv file listed. Next to srv, clickBuild 1 srv.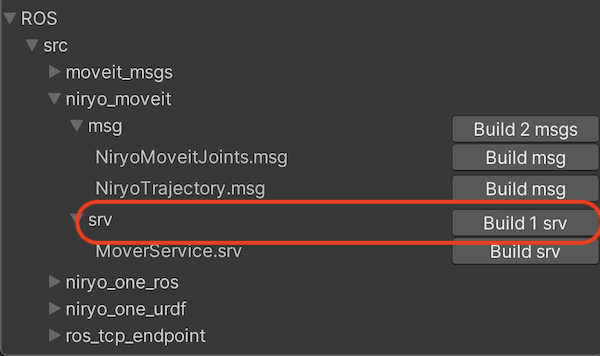
- Two new C# scripts should populate the
Assets/RosMessages/NiryoMoveit/srvdirectory: MoverServiceRequest and MoverServiceResponse. These files describe the expected input and output formats for the service requests and responses when calculating trajectories.
MessageGeneration generates two C# classes, a request and response, from a ROS srv file with protections for use of C# reserved keywords and conversion to C# datatypes. Learn more about ROS Services.
You can now close the ROS Message Browser window.
- Two new C# scripts should populate the
-
In this repo, navigate to
Unity-Robotics-Hub/tutorials/pick_and_place. Select and copy theScriptsfolder and contents into theAssetsfolder of your Unity project. You should now find two C# scripts in your project'sAssets/Scripts.Note: The SourceDestinationPublisher script is one of the included files. This script will communicate with ROS, grabbing the positions of the target and destination objects and sending it to the ROS Topic
"SourceDestination_input". ThePublish()function is defined as follows:public void Publish() { NiryoMoveitJointsMsg sourceDestinationMessage = new NiryoMoveitJointsMsg(); sourceDestinationMessage.joint_00 = jointArticulationBodies[0].xDrive.target; sourceDestinationMessage.joint_01 = jointArticulationBodies[1].xDrive.target; sourceDestinationMessage.joint_02 = jointArticulationBodies[2].xDrive.target; sourceDestinationMessage.joint_03 = jointArticulationBodies[3].xDrive.target; sourceDestinationMessage.joint_04 = jointArticulationBodies[4].xDrive.target; sourceDestinationMessage.joint_05 = jointArticulationBodies[5].xDrive.target; // Pick Pose sourceDestinationMessage.pick_pose = new PoseMsg { position = target.transform.position.To<FLU>(), // The hardcoded x/z angles assure that the gripper is always positioned above the target cube before grasping. orientation = Quaternion.Euler(90, target.transform.eulerAngles.y, 0).To<FLU>() }; // Place Pose sourceDestinationMessage.place_pose = new PoseMsg { position = targetPlacement.transform.position.To<FLU>(), orientation = pickOrientation.To<FLU>() }; // Finally send the message to server_endpoint.py running in ROS ros.Send(topicName, sourceDestinationMessage); }This function first takes in the current joint target values. Then, it grabs the poses of the
targetand thetargetPlacementobjects, adds them to the newly created messagesourceDestinationMessage, and callsSend()to send this information to the ROS topictopicName(defined as"SourceDestination_input").Note: Going from Unity world space to ROS world space requires a conversion. Unity's coordinate space has x Right, y Up, and z Forward (hence "RUF" coordinates); ROS has x Forward, y Left and z Up (hence "FLU"). So a Unity
(x,y,z)coordinate is equivalent to the ROS(z,-x,y)coordinate. These conversions are done by theTo<FLU>function in the ROS-TCP-Connector package's ROSGeometry component. -
Return to the Unity Editor. Now that the message contents have been defined and the publisher script added, it needs to be added to the Unity world to run its functionality.
Right click in the Hierarchy window and select "Create Empty" to add a new empty GameObject. Name it
Publisher. Add the newly created SourceDestinationPublisher component to the Publisher GameObject by selecting the Publisher object. Click "Add Component" in the Inspector, and begin typing "SourceDestinationPublisher." Select the component when it appears.Note: Alternatively, you can drag the script from the Project window onto the Publisher object in the Hierarchy window.
-
Note that this component shows empty member variables in the Inspector window, which need to be assigned.
Select the Target object in the Hierarchy and assign it to the
Targetfield in the Publisher. Similarly, assign the TargetPlacement object to theTargetPlacementfield. Assign the niryo_one robot to theNiryo Onefield.
-
Next, the ROS TCP connection needs to be created. Select
Robotics -> ROS Settingsfrom the top menu bar.In the ROS Settings window, the
ROS IP Addressshould be the IP address of your ROS machine (not the one running Unity).-
Find the IP address of your ROS machine. In Ubuntu, open a terminal window, and enter
hostname -I. -
If you are not running ROS services in a Docker container, replace the
ROS IP Addressvalue with the IP address of your ROS machine. Ensure that theHost Portis set to10000. -
If you are running ROS services in a Docker container, fill
ROS IP Addresswith the loopback IP address127.0.0.1and theOverride Unity IP Addressas your local machine's IP address. Otherwise, leave theOverride Unity IP Addressfield empty.

Opening the ROS Settings has created a ROSConnectionPrefab in
Assets/Resourceswith the user-input settings. When the staticROSConnection.instanceis referenced in a script, if aROSConnectioninstance is not already present, the prefab will be instantiated in the Unity scene, and the connection will begin.Note: While using the ROS Settings menu is the suggested workflow as of this version, you may still manually create a GameObject with an attached ROSConnection component.
-
-
Next, we will add a UI element that will allow user input to trigger the
Publish()function. In the Hierarchy window, right click to add a new UI > Button. Note that this will also create a new Canvas parent, as well as an Event System.Note: In the
Gameview, you will see the button appear in the bottom left corner as an overlay. InSceneview the button will be rendered on a canvas object that may not be visible.Note: In case the Button does not start in the bottom left, it can be moved by setting the
Pos XandPos Yvalues in its Rect Transform component. For example, setting its Position to(-200, -200, 0)would set its position to the bottom right area of the screen. -
Select the newly made Button object, and scroll to see the Button component in the Inspector. Click the
+button under the emptyOnClick()header to add a new event. Select thePublisherobject in the Hierarchy window and drag it into the new OnClick() event, where it saysNone (Object). Click the dropdown where it saysNo Function. Select SourceDestinationPublisher >Publish().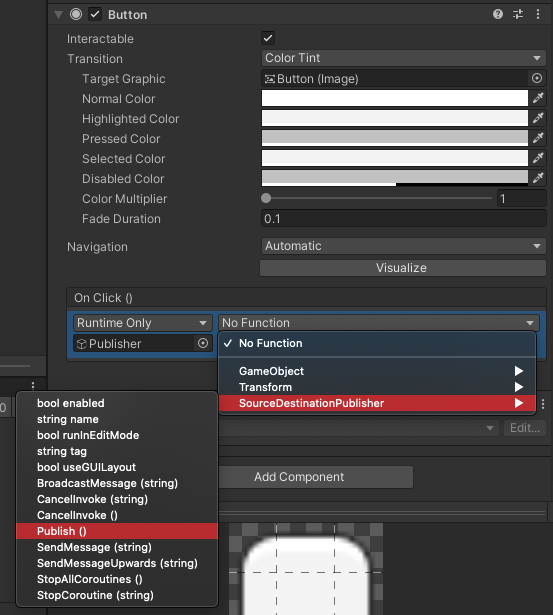
-
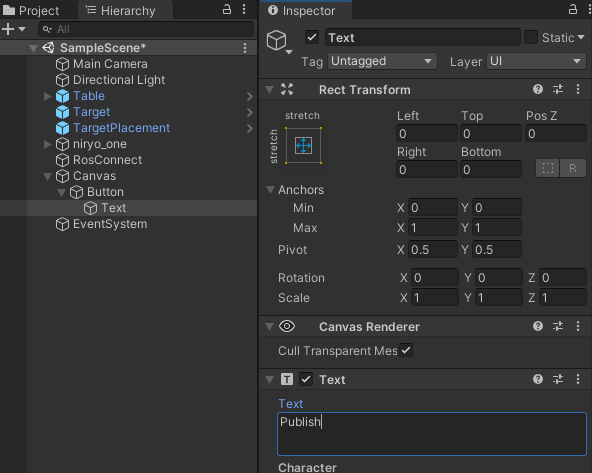
To change the text of the Button, expand the Button Hierarchy and select Text. Change the value in Text on the associated component.
The ROS side
Note: This project has been tested with Python 2 and ROS Melodic, as well as Python 3 and ROS Noetic.
Most of the ROS setup has been provided via the niryo_moveit package. This section will describe the .launch files and start the necessary ROS nodes for communication. If you have not already followed the steps in Part 0 to set up your ROS workspace, do so now.
-
Open a terminal window in the ROS workspace. Once again, source the workspace. Then, run the following
roslaunchin order to set the ROS parameters, start the server endpoint, and start the trajectory subscriber.roslaunch niryo_moveit part_2.launchNote: Running
roslaunchautomatically starts ROS Core if it is not already running.Note: This launch file has been copied below for reference. The server_endpoint and trajectory_subscriber nodes are launched from this file, and the ROS params (set up in Part 0) are loaded from this command. The launch files for this project are available in the package's
launchdirectory, i.e.src/niryo_moveit/launch/.<launch> <rosparam file="$(find niryo_moveit)/config/params.yaml" command="load"/> <node name="server_endpoint" pkg="niryo_moveit" type="server_endpoint.py" args="--wait" output="screen" respawn="true" /> <node name="trajectory_subscriber" pkg="niryo_moveit" type="trajectory_subscriber.py" args="--wait" output="screen"/> </launch>This launch will print various messages to the console, including the set parameters and the nodes launched.
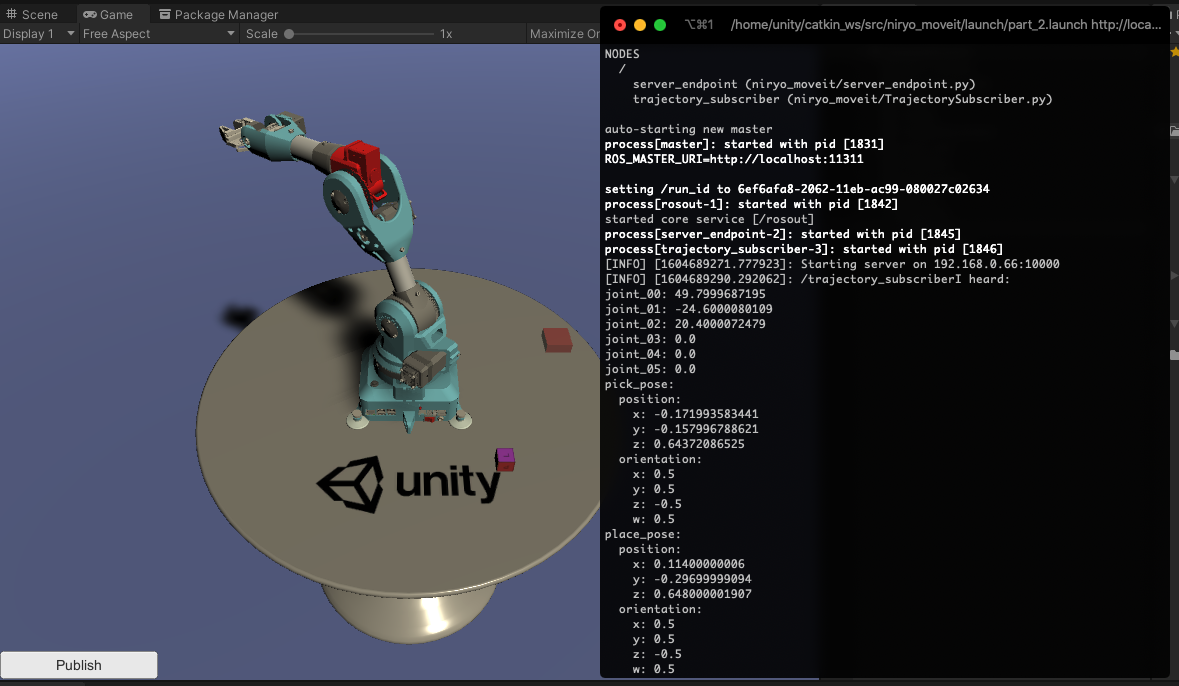
Ensure that the
process[server_endpoint]andprocess[trajectory_subscriber]were successfully started, and that a message similar to[INFO] [1603488341.950794]: Starting server on 192.168.50.149:10000is printed. -
Return to Unity, and press Play. Click the UI Button in the Game view to call SourceDestinationPublisher's
Publish()function, publishing the associated data to the ROS topic. View the terminal in which theroslaunchcommand is running. It should now printI heard:with the data.
ROS and Unity have now successfully connected!
Troubleshooting
-
If the error
[rosrun] Found the following, but they're either not files, or not executable: server_endpoint.pyappears, the Python script may need to be marked as executable viachmod +x Unity-Robotics-Hub/tutorials/pick_and_place/ROS/src/niryo_moveit/scripts/server_endpoint.py. -
...failed because unknown error handler name 'rosmsg'This is due to a bug in an outdated package version. Try runningsudo apt-get update && sudo apt-get upgradeto upgrade. -
If Unity fails to find a network connection, ensure that the ROS IP address is entered correctly as the ROS IP Address in the RosConnect in Unity, and that the
src/niryo_moveit/config/params.yamlvalues are set correctly. -
If the ROS TCP handshake fails (e.g.
ROS-Unity server listening...printed on the Unity side but noROS-Unity Handshake receivedon the ROS side), the ROS IP may not have been set correctly in the params.yaml file. Try runningecho "ROS_IP: $(hostname -I)" > src/niryo_moveit/config/params.yamlin a terminal from your ROS workspace. -
If the UI buttons appear to be unresponsive, such as not responding to clicks, ensure there is an EventSystem in the scene hierarchy. This should be added automatically when adding UI elements, but if it is not, you can add one to your scene from the Hierarchy window via
(+) > UI > Event System. You can also access this dropdown from right-clicking in an empty area in the Hierarchy window.
Resources
- More on ROS Topics
- ROS–Unity Integration Tutorials
- ROS TCP Connector package
- TCP Endpoint package
- Niryo One ROS stack
- MoveIt Msgs