2.3 KiB
ROS–Unity Integration
Editor Version
Most of our projects are developed/tested on Unity Editor version 2020.2.0f9 or later. We expect that anything 2020.2+ should be compatible, and will be actively working to ensure this for future versions. 2020.1.X and below are unlikely to work well, if at all, and we strongly encourage updating to a more recent version to support the bleeding edge updates to Unity's physics and simulation components that we are leveraging.
ROS–Unity Communication
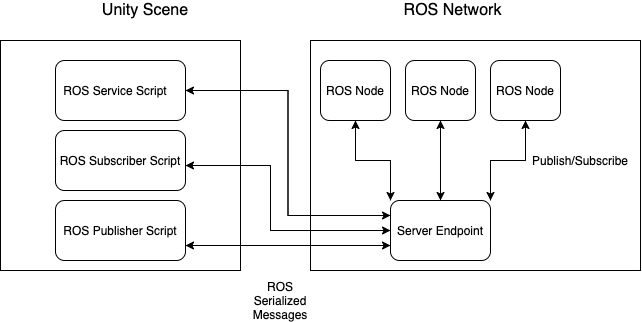
A TCP endpoint running as a ROS node, which facilitates message passing to and from Unity and ROS.
The messages being passed between Unity and ROS are expected to be serialized as ROS would internally serialize them. To achieve this, the MessageGeneration plugin (from the ROS TCP Connector repo) can generate C# classes, including serialization and deserialization functions, from ROS .msg files.
The ROSConnection plugin (also from ROS TCP Connector) provides the Unity scripts necessary to publish, subscribe, or call a service.
Tutorials
- ROS–Unity Integration: Publisher - Adding a Publisher to a Unity Scene
- ROS–Unity Integration: Subscriber - Adding a Subscriber to a Unity Scene
- ROS–Unity Integration: Service - Adding a Service call to a Unity Scene
- ROS–Unity Integration: UnityService - Adding a Service that runs in a Unity Scene
- ROS–Unity Integration: Server Endpoint - How to write a Server Endpoint
Example Unity Scripts
Example scripts implemented in tutorials:
-
unity_scripts/RosPublisherExample.cs- Publishes the position of a GameObject every 0.5 seconds.
-
unity_scripts/RosSubscriberExample.cs- Subscribes to a topic that accepts color messages and uses them to change the color of a GameObject in the Unity scene.
-
unity_scripts/RosServiceExample.cs- Returns a destination position for a GameObject to move towards each time the service is called.
-
unity_scripts/RosUnityServiceExample.cs- Runs a service in the Unity scene that takes a GameObject's name and responds with the Pose of that object.