- If the robot moves to the incorrect location, or executes the poses in an expected order, verify that the shoulder_link (i.e. `niryo_one/world/base_link/shoulder_link`) X Drive Force Limit is `5`.
- Before entering Play mode in the Unity Editor, ensure that all ROS processes are still running. The `server_endpoint` node may time out and will need to be re-run.
- Before entering Play mode in the Unity Editor, ensure that all ROS processes are still running. The `server_endpoint` node may time out and will need to be re-run.
1. In Unity, Select Robotics -> ROS Settings from the top menu bar and update the ROS IP Address to that of the Niryo One.
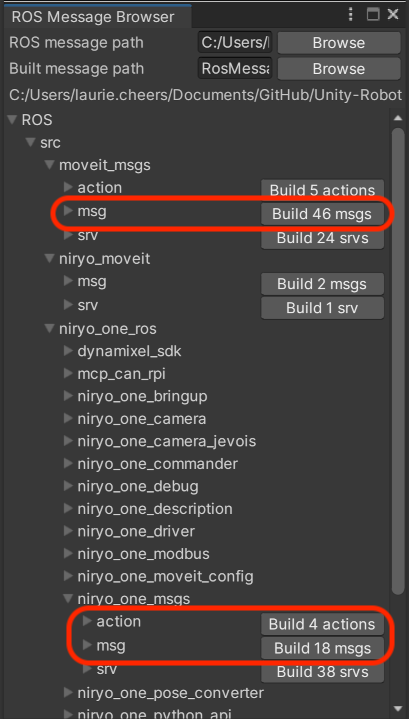
1. Select "Robotics/Generate ROS Messages..." from the menu and build the messages you will need - Build the contents of the moveit_msgs/msg folder, the niryo_one_ros/niryo_one_msgs/action folder and the niryo_one_ros/niryo_one_msgs/msg folder.

1. Find PATH/TO/Unity-Robotics-Hub/tutorials/pick_and_place/Scripts_Part4 and copy into your project's Assets folder.
1. Select the Publisher GameObject and add the `RealSimPickAndPlace` script as a component.
1. Note that the RealSimPickAndPlace component shows its member variables in the Inspector window, which need to be assigned.
{kind=link}