|
|
|
|
|
|
|
# ROS–Unity Integration Networking |
|
|
|
|
|
|
|
## Table of Contents |
|
|
|
- [Definitions](#definitions) |
|
|
|
- [Communicaton Minimum Requirements](#communication-minimum-requirements) |
|
|
|
- [If Using Docker](#if-using-docker) |
|
|
|
- [Explicitly Setting UNITY_IP](#explicitly-setting-unity_ip) |
|
|
|
- [Troubleshoooting](#troubleshooting) |
|
|
|
- [Where Does Communication Break Down](#where-does-communication-break-down) |
|
|
|
- [1. Can Unity send messages to ROS?](#1-can-unity-send-messages-to-ros) |
|
|
|
- [2. Can ROS send messages to Unity?](#2-can-ros-send-messages-to-unity) |
|
|
|
- [Open Port on Windows Firewalll](#open-port-on-windows-firewall) |
|
|
|
|
|
|
|
# Definitions |
|
|
|
|
|
|
|
`ROS_IP` : The IP address of the machine, VM, or container running ROS. |
|
|
|
|
|
|
|
`UNITY_IP` : The IP address of the machine running Unity. |
|
|
|
|
|
|
|
> It is possible to set both of these variables on the machines running Unity and ROS. The specifics of where and why each of these settings will be described below. |
|
|
|
|
|
|
|
On the ROS machine these settings are set as a rosparam and will typically be set in a launch file like [this](https://github.com/Unity-Technologies/Unity-Robotics-Hub/blob/main/tutorials/ros_packages/robotics_demo/launch/robo_demo.launch) or in a [param file](https://github.com/Unity-Technologies/Unity-Robotics-Hub/blob/main/tutorials/pick_and_place/ROS/src/niryo_moveit/config/params.yaml) loaded by a launch file like [this](https://github.com/Unity-Technologies/Unity-Robotics-Hub/blob/main/tutorials/pick_and_place/ROS/src/niryo_moveit/launch/part_3.launch#L2). The param file can also be loaded manually by running the `rosparam load params.yaml` command. |
|
|
|
|
|
|
|
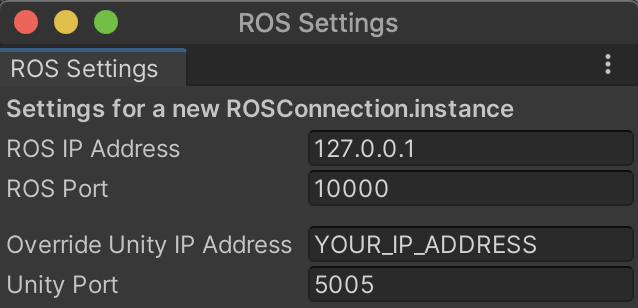
On the Unity machine these settings are set from the menu by going to `Robotics` -> `ROS Settings` |
|
|
|
|
|
|
|
|
|
|
|
# Communication Minimum Requirements |
|
|
|
|
|
|
|
The minimum settings required for Unity to communicate with ROS is to set the `ROS_IP` on the ROS side in a launch file and on the Unity side in `Robotics` -> `ROS Settings`. |
|
|
|
|
|
|
|
## If Using Docker |
|
|
|
|
|
|
|
The container will need to be started with the following arguments to forward the ports used for communication between ROS and Unity. |
|
|
|
|
|
|
|
`-p 10000:10000 -p 5005:5005` |
|
|
|
|
|
|
|
|
|
|
|
- On the ROS side, set `ROS_IP` to `0.0.0.0`. |
|
|
|
|
|
|
|
- On the Unity side, set `ROS_IP` to `127.0.0.1` and the `Override Unity IP Address` to your local machine's IP address. |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
## Explicitly setting `UNITY_IP` |
|
|
|
|
|
|
|
The `UNITY_IP` can be set in two different places. |
|
|
|
|
|
|
|
1. If set on the ROS side as a rosparam, the `server_endpoint` will only use this IP to send messages to Unity. |
|
|
|
1. If set on the Unity side as the `Override Unity IP Address`, the `UNITY_IP` on the ROS side will be set to this value during the initial handshake between ROS and Unity once play is pressed in the Editor. |
|
|
|
|
|
|
|
> If the `UNITY_IP` is not set in either of these places, then the IP that makes the first connection to ROS during the initial handshake will be used. |
|
|
|
|
|
|
|
# Troubleshooting |
|
|
|
|
|
|
|
## Where Does Communication Break Down |
|
|
|
|
|
|
|
### 1. Can Unity send messages to ROS? |
|
|
|
|
|
|
|
When play is pressed in the Editor, a handshake message is sent from Unity to ROS. |
|
|
|
|
|
|
|
If Unity can communicate with ROS, the following message should be printed to the console screen running the `server_endpoint.py` script. |
|
|
|
|
|
|
|
```[UnityTcpSender]: ROS-Unity Handshake received, will connect to UNITY_IP_ADDRESS:5005``` |
|
|
|
|
|
|
|
With the corresponding response message printed to the Unity console, |
|
|
|
|
|
|
|
```ROS-Unity server listening on UNITY_IP_ADDRESS:5005``` |
|
|
|
|
|
|
|
|
|
|
|
If the previous message is not shown and either of the following errors are thrown instead: |
|
|
|
|
|
|
|
``` |
|
|
|
SocketException: A connection attempt failed because the connected party did not respond after a period of time, or established connection failed because connected host has failed to respond. |
|
|
|
``` |
|
|
|
|
|
|
|
``` |
|
|
|
SocketException: Connection refused |
|
|
|
``` |
|
|
|
|
|
|
|
Confirm that: |
|
|
|
|
|
|
|
- `server_endpoint` is running |
|
|
|
- You can ping ROS machine from Unity machine |
|
|
|
- From a terminal on the Unity machine, run the following command to confirm whether the ROS machine is reachable over the network. ```ping ROS_IP``` |
|
|
|
|
|
|
|
If issue still persists: |
|
|
|
|
|
|
|
- Confirm your IP addresses |
|
|
|
- If on Windows you may need to [open ports for the firewall](#open-port-on-windows-firewall). |
|
|
|
|
|
|
|
### 2. Can ROS send messages to Unity? |
|
|
|
|
|
|
|
After it is confirmed that Unity can communicate with ROS, publish a message to a ROS topic to which Unity has instantiated a subscriber. |
|
|
|
|
|
|
|
If an error is thrown in the `server_endpoint` console then ROS cannot connect to Unity. |
|
|
|
|
|
|
|
If issue still persists: |
|
|
|
|
|
|
|
- Confirm your IP addresses |
|
|
|
- Explicitly set the `UNITY_IP` |
|
|
|
- If on Windows you may need to [open ports for the firewall](#open-port-on-windows-firewall). |
|
|
|
|
|
|
|
## Open port on Windows Firewall |
|
|
|
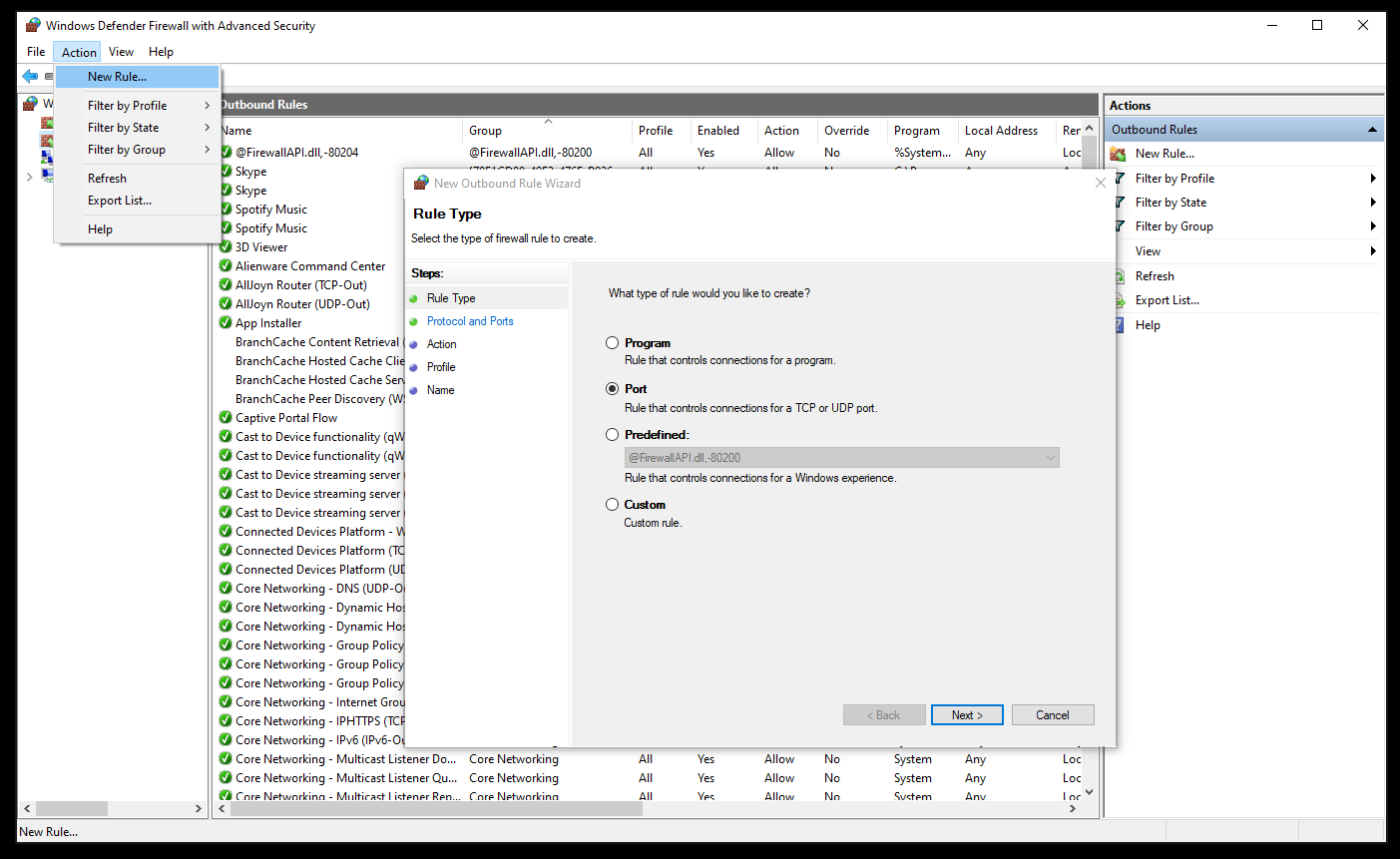
- Open port in Windows Firewall by opening `Windows Defender Firewall` then selecting `Action` -> `New Rule...` |
|
|
|
- Port `10000` will need to be added as an outbound rule |
|
|
|
- Port `5005` will need to obe added as an inbound rule |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
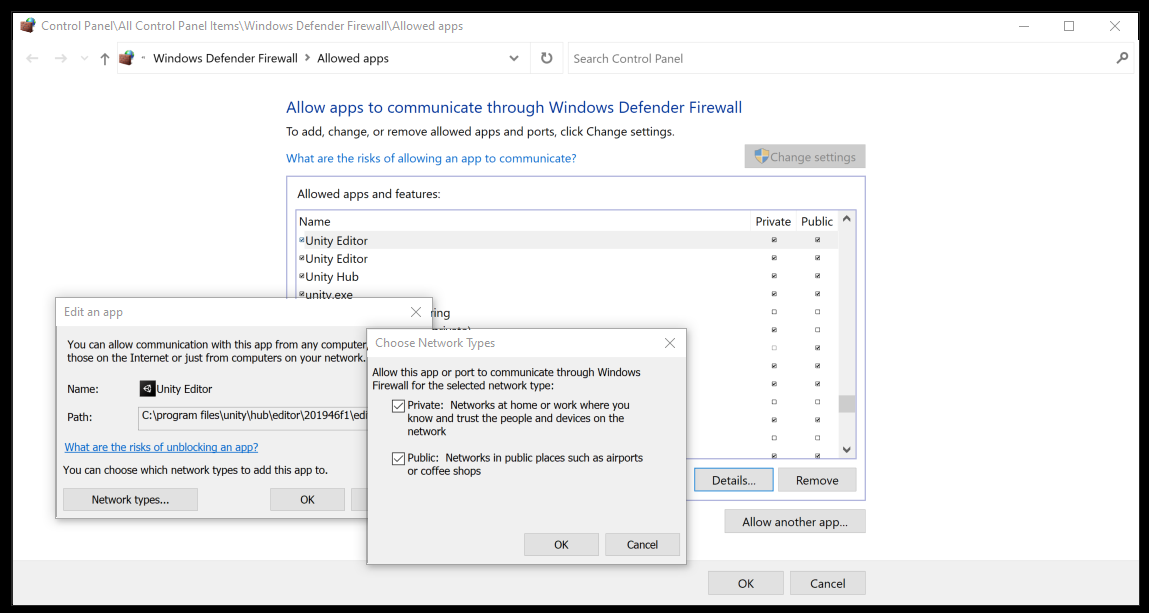
In some instances opening a port did not resolve the communication issues and the Unity Editor had to be allowed through the firewall |
|
|
|
|
|
|
|
- Allow the Editor through the firewall by opening `Windows Defender Firewall` -> `Allowed Apps` and then modifying the settings for the Unity Editor to allow communication on private and public networks. |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
{kind=link}
{kind=link}
{kind=link}

{kind=link}
{kind=link}
